Einleitung #
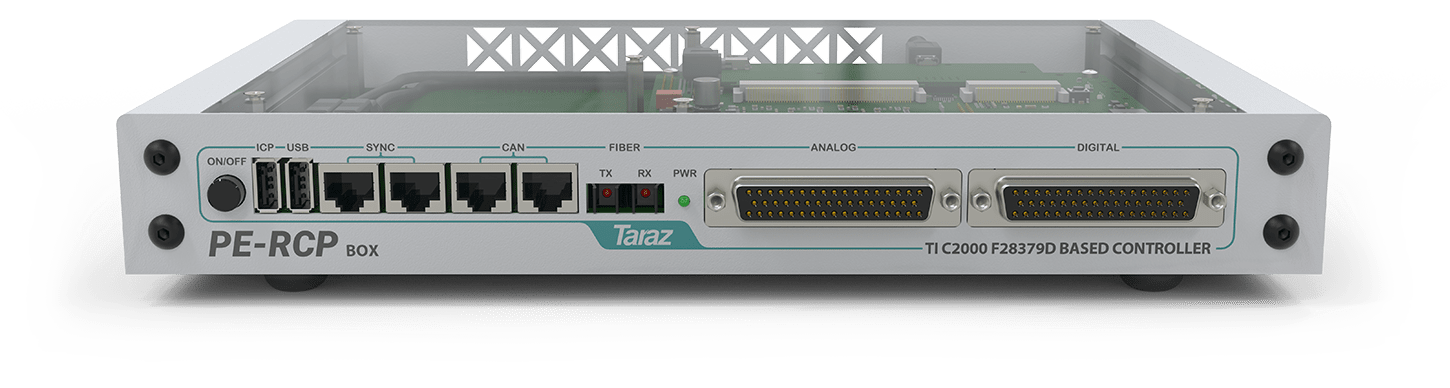
Die PE-RCP Box ist eine Rapid-Control-Prototyping-Lösung, die auf dem Mikrocontroller TI C2000 F28379D basiert. Sie wurde speziell für die Unterstützung der blockbasierten Programmierung in MATLAB/Simulink und PSIM entwickelt und ist daher für die Entwicklung von Regelalgorithmen für leistungselektronische Systeme unerlässlich. Dieser Leitfaden beschreibt den Einstieg in die MATLAB/Simulink-Programmierung auf der PE-RCP Box.
*Hinweis: Dieses Dokument gilt auch für PE-RCP
Vorraussetzungen
Die folgenden Werkzeuge sind Voraussetzung für das Verständnis und die Umsetzung des in diesem Artikel beschriebenen Beispiels:
- PE-RCP-Box
- MATLAB R2019b oder neuere Version
- Code Composer Studio Version 11
Hardware-Übersicht #
Die PE-RCP Box kann für die Implementierung von Regelalgorithmen auf Leistungselektronik-Hardware sowie für Hardware-in-Loop-Systeme (HIL) verwendet werden. Sie ermöglicht auch die Diagnose und Fehlerberichterstattung über verschiedene verfügbare Verbindungen/Ports wie Glasfaser, CAN, USB und DB-50/DB-37-Buchsen.
Befolgen Sie diese Schritte, um die PE-RCP Box für die Ausführung der Demoanwendung vorzubereiten:
- Schalten Sie die PE-RCP-Box mit dem 15-V-Adapter ein.
- Verbinden Sie den ICP USB über ein Typ-A-USB-Kabel mit dem Computer.
- Drücken Sie die Taste ON/OFF auf dem Bedienfeld.
C2000-Unterstützungspaket für MATLAB #
Installieren Sie das Embedded Coder Support Package für Texas Instruments C2000 Prozessoren für MATLAB. Stellen Sie sicher, dass Sie mit dem Internet verbunden sind, bevor Sie fortfahren.
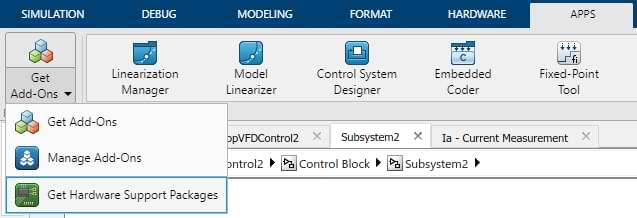
Schritt 1: Klicken Sie auf Get Hardware Support Package in der Registerkarte "Apps":
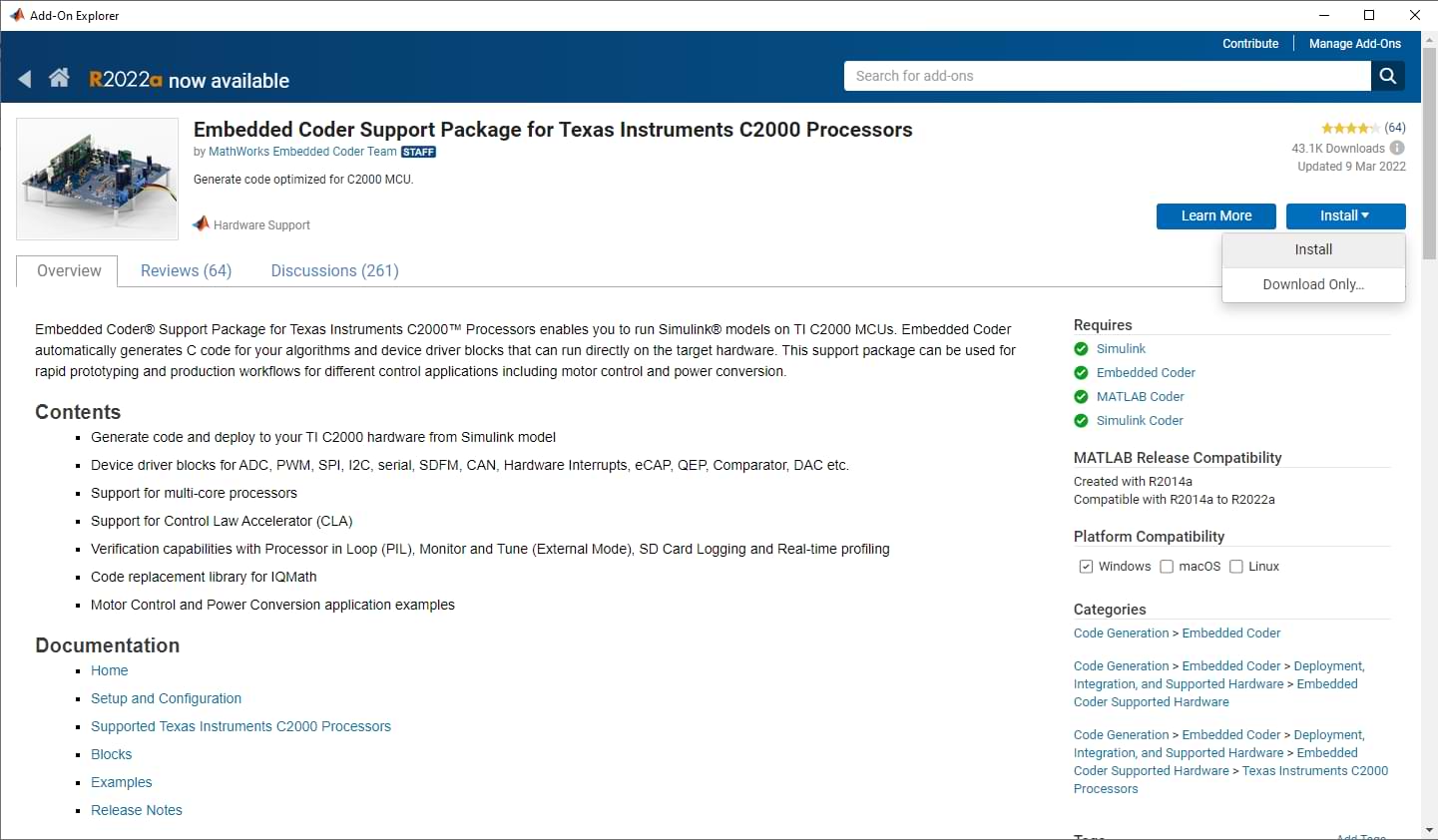
Schritt 2: Wählen Sie "Embedded Coder Support Package for Texas Instruments C2000 Processors" und drücken Sie auf Installieren:
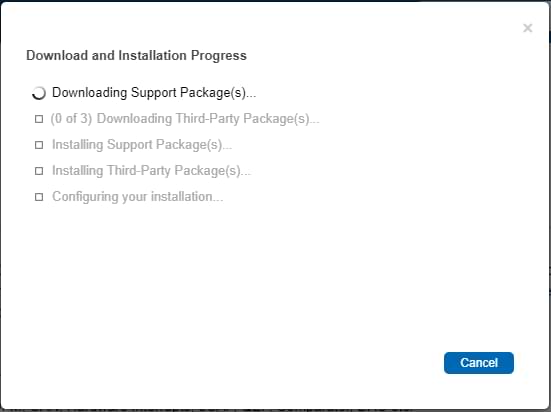
Schritt 3: Nach Beginn der Installation zeigt das folgende Fenster den Installationsstatus an:
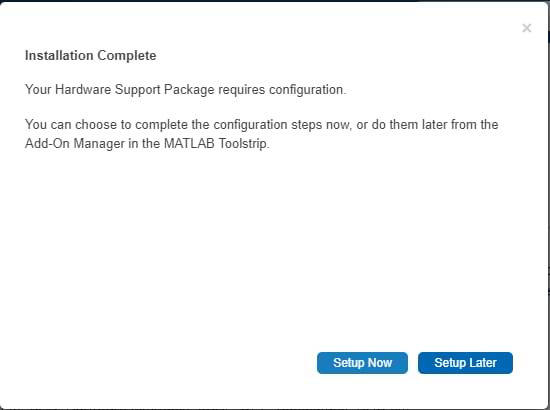
Schritt 4: Nachdem die Installation abgeschlossen ist, klicken Sie auf "Jetzt einrichten":
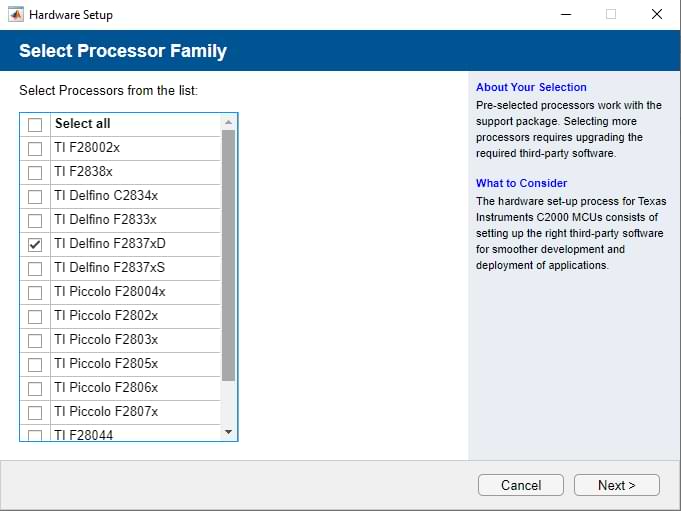
Schritt 5: Wählen Sie TI Delfino F2837xD in der Prozessorfamilie und klicken Sie auf "Weiter":
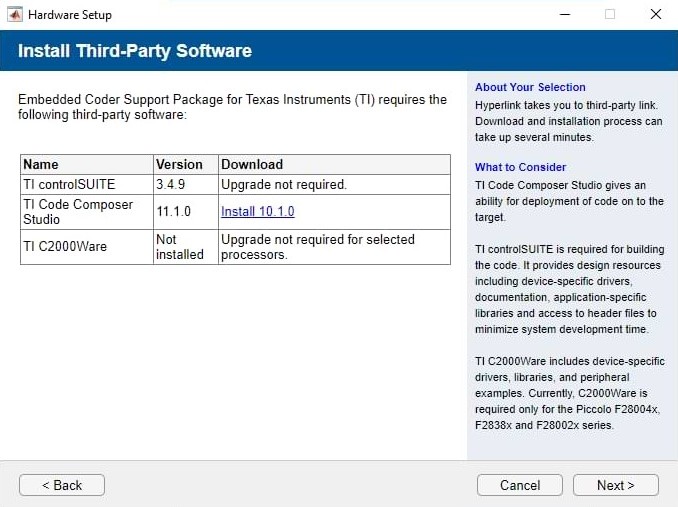
Schritt 6: Installieren Sie die erforderliche Software von Drittanbietern und klicken Sie auf "Weiter":
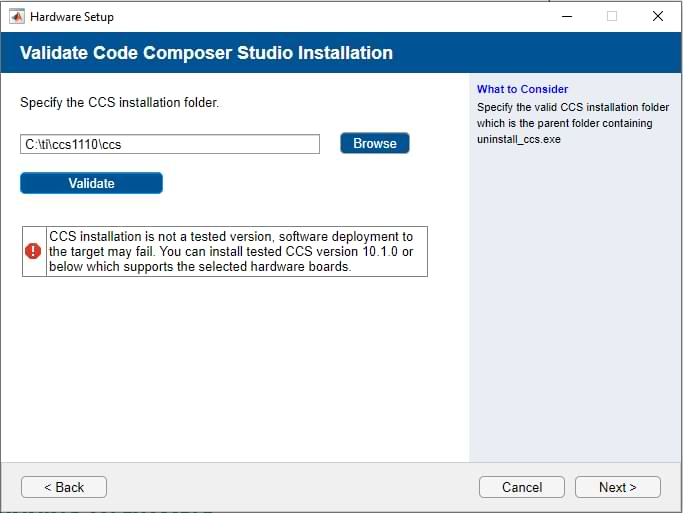
Schritt 7: Klicken Sie für den CCS-Installationsordner auf "Validieren" (ignorieren Sie die Warnung) und dann auf "Weiter":
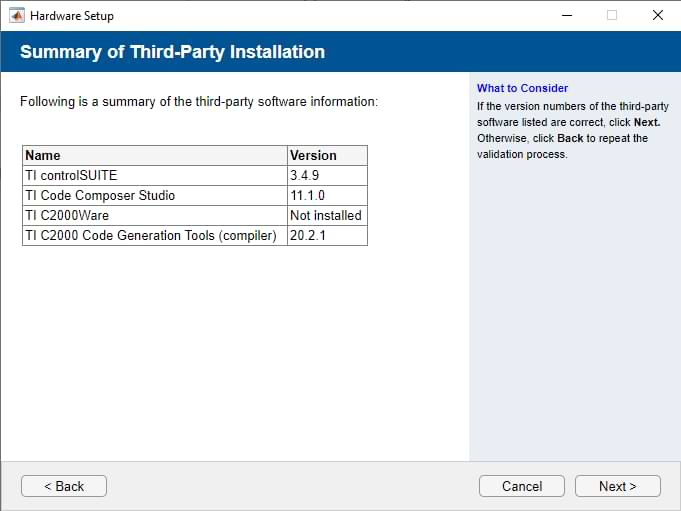
Schritt 8: Überprüfen Sie die Installationszusammenfassung und klicken Sie auf "Weiter", um die Installation abzuschließen:
Laufende U/f-Steuerung Beispiel #
Dieses Dokument verwendet das "PE-RCP V/f Control Example", um die Verwendung mit der PE-RCP Box zu demonstrieren. Stellen Sie sicher, dass Sie alle erforderlichen Tools installieren, bevor Sie fortfahren.
Schritt 1: Laden Sie das beigefügte Beispiel herunter und öffnen Sie es.
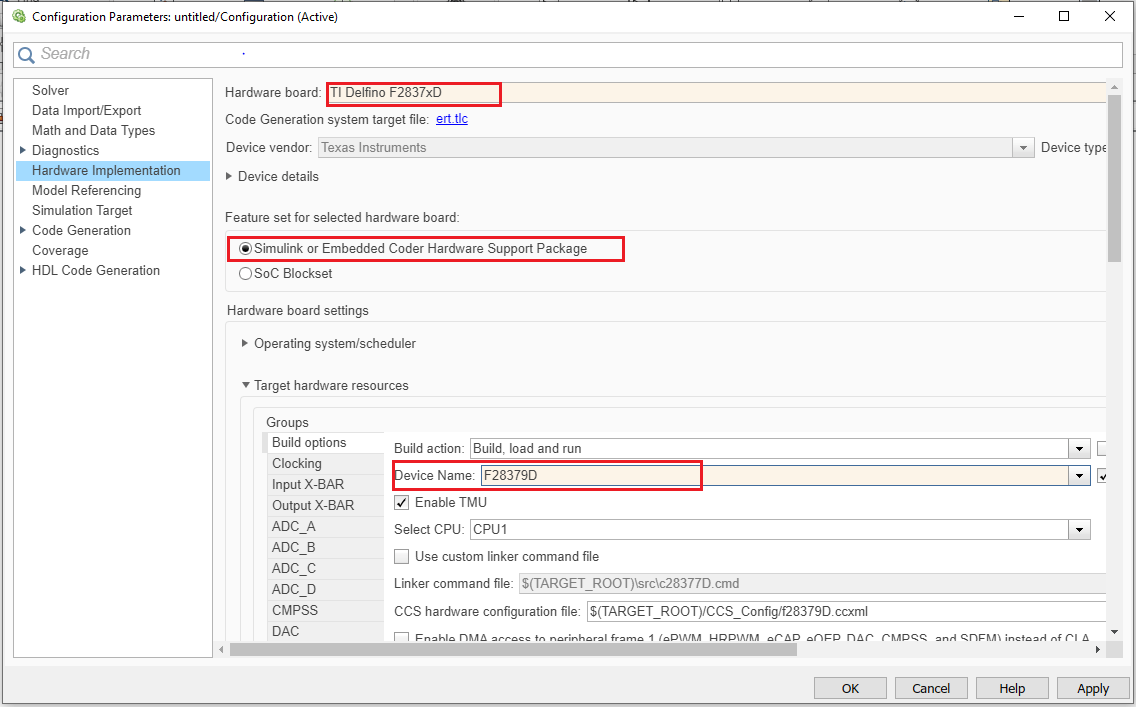
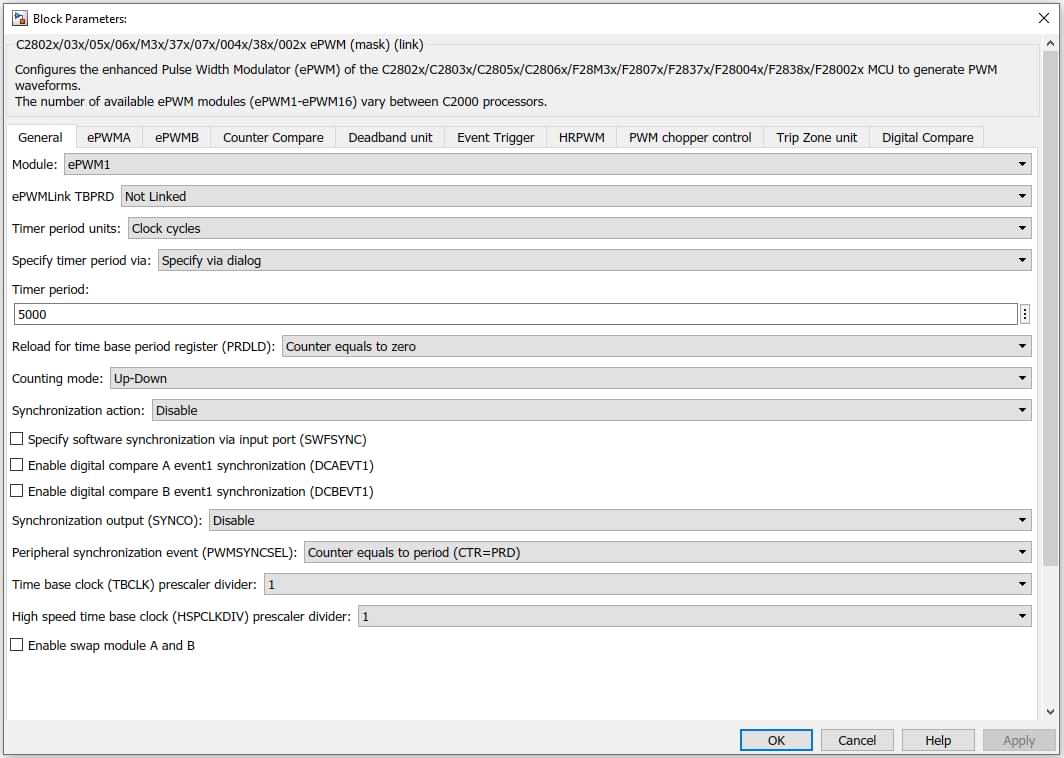
Schritt 2: Stellen Sie sicher, dass die Hardware-Einstellungen wie unten angegeben sind:
Schritt 3: Klicken Sie auf Build, Deploy und Start. Der Algorithmus wird nun auf die PE-RCP Box hochgeladen:

Umsetzung #
In diesem Abschnitt wird die praktische Umsetzung der U/f-Steuerung eines dreiphasigen Induktionsmotors beschrieben.
Erforderliche Ausrüstung #
Für die praktische Überprüfung der Funktionsfähigkeit der U/f-Steuerung sind die folgenden Geräte erforderlich.
- PE-Labor (PLB-6PH)
- Dreiphasige Last (Induktionsmotor/Induktoren)
- DC-Stromversorgung
Details zur Umsetzung #
Die PE-RCP Box benötigt für die Umsetzung dieses Beispiels eine externe Leistungsstufe und die dreiphasige Last. In diesem Leitfaden werden die Ergebnisse der VFD-Steuerung am PE-Lab (PLB-6PH) mit einem dreiphasigen Induktionsmotor als Last beschrieben.
Dieses Beispiel demonstriert die folgenden Konzepte:
- Bei der U/f-Steuerung handelt es sich um einen Drehzahlregelungsalgorithmus für einen Drehstrom-Asynchronmotor, d. h. das U/f-Verhältnis bleibt immer konstant. Wenn die Frequenz sinkt, sinkt die Ausgangsspannung und umgekehrt
- Die Zwischenkreisspannung hat keinen Einfluss auf die Ausgangsspannung. Stattdessen reguliert sie den Modulationsindex, um die Ausgangsspannung konstant zu halten.
In diesem Beispiel wird die Frequenzänderung immer mit einem bestimmten Beschleunigungsfaktor durchgeführt, wodurch die Forderung nach sehr hohen Augenblicksströmen vermieden wird.
In diesem Beispiel werden die folgenden TI-C2000-Blöcke zur Implementierung verwendet:
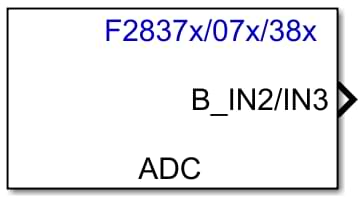
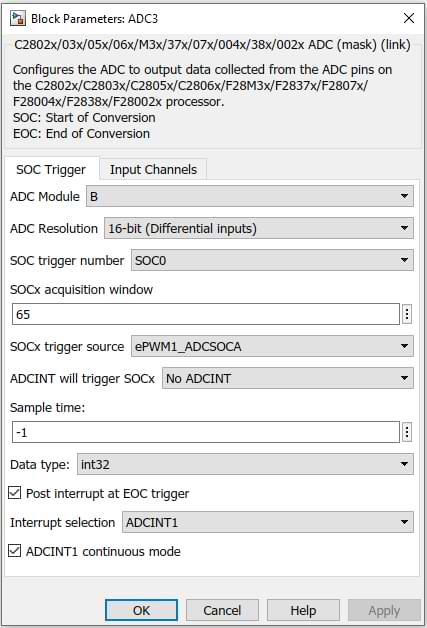
ADC-Block #
Ein einzelner ADC-Block steuert die Analog-Digital-Wandlung eines einzelnen analogen Kanals. Dieser Block bietet die Parameter zur Auswahl des entsprechenden Moduls, der Auflösung und des Triggersignals für den gewünschten Analogkanal. Bei Bedarf kann auch ein ADC-Interrupt für einen Kanal aktiviert werden.
In diesem Beispiel liest der 16-Bit-ADC die Messung der Zwischenkreisspannung und des Phasenstroms. Beide Umwandlungen werden vom ePWM1-Block ausgelöst, während das Ende der Umwandlung für die Zwischenkreisspannungsmessung das Interruptsignal erzeugt.
Weitere Informationen finden Sie in Kapitel 11 dieses Dokuments: https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf.
Hardware-Unterbrechung #
Der Mikrocontroller F28379D verfügt über einen Hardware-Interrupt zur Auslösung von Aktionen bei verschiedenen Ereignissen. Die Auswahl des Interrupts basiert auf der PIE-Vektortabelle. Details zur PIE-Vektortabelle finden Sie unter dem folgenden Link:
https://www.mathworks.com/help/supportpkg/texasinstrumentsc2000/ref/c28xhardwareinterrupt.html
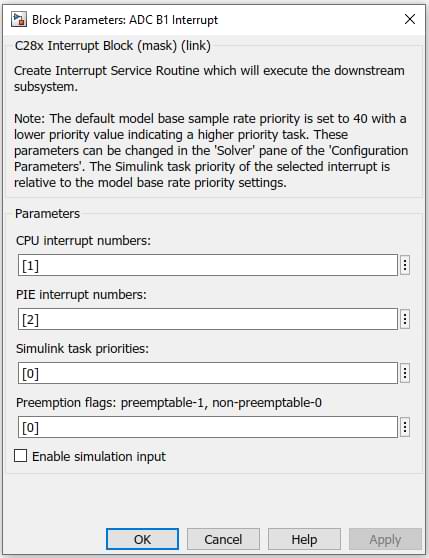
In diesem Beispiel löst der Interrupt-Block den Steueralgorithmus aus und berechnet so die Tastverhältnisse für den nächsten PWM-Zyklus. In diesem Beispiel wird die Unterbrechung der Umwandlung bei der Messung der Zwischenkreisspannung verwendet.
ePWM-Block #
Der ePWM-Block steuert das PWM-Signal. Jeder Block enthält zwei PWM-Signale: ePWMA und ePWMB. Der Event-Trigger-Bereich kann für den ePWM-Hardware-Interrupt und die Synchronisation mit anderen Modulen verwendet werden. Die Deadband Unit steuert die Totzeit zwischen dem PWM-Paar.
In diesem Beispiel erzeugt der ePWM-Block die PWM-Signale und sendet das Signal "Start of Conversion" (SOC) an die ADC-Module.
Weitere Informationen finden Sie in Kapitel 15 dieses Dokuments: https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf
Spezifikationen #
Die folgende Tabelle enthält die relevanten Implementierungsspezifikationen:
| PARAMETER | WERT |
| PWM-Frequenz | 10 KHz |
| Ausgang Erforderliche Frequenz | 15 Hz - 25 Hz |
| Zwischenkreisspannung | 300V - 600V |
| Dreiphasige Motorleistung | 380VL-L /50Hz |
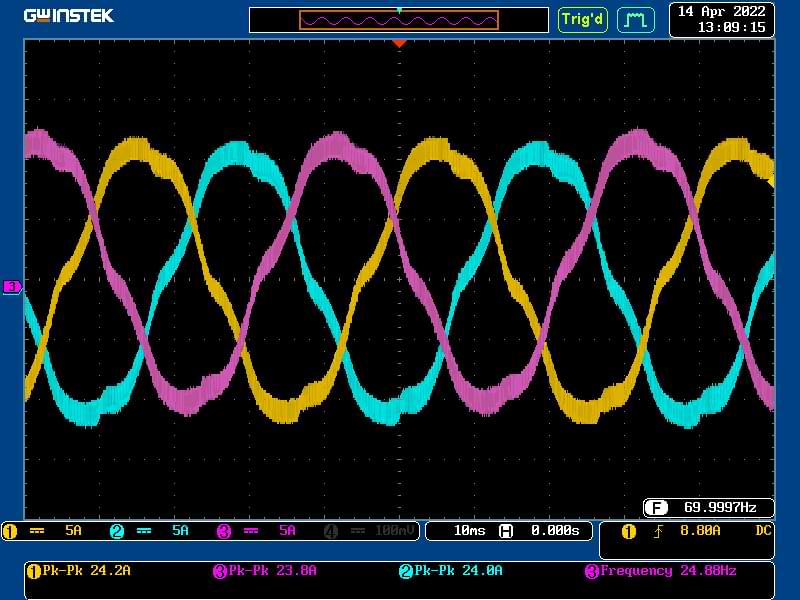
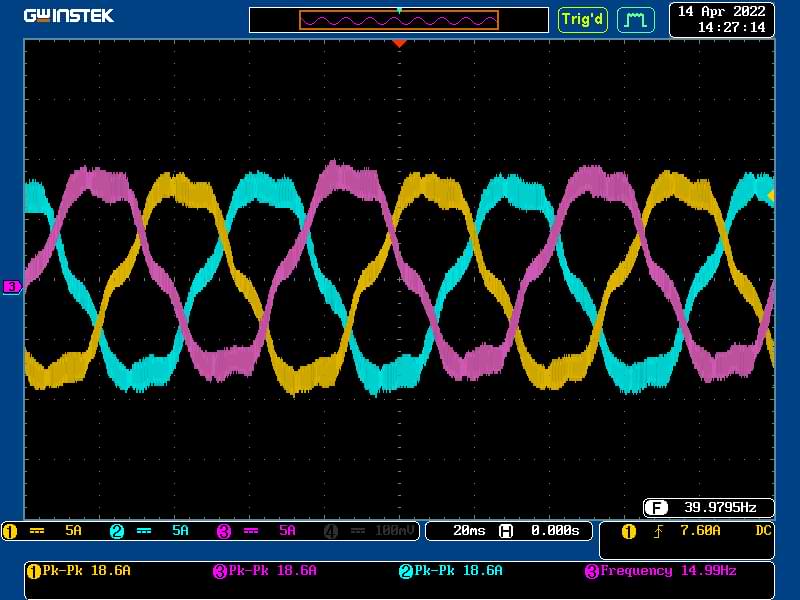
Ergebnisse #
In diesem Abschnitt werden die Ausgangsstromwellenformen für drei Phasen bei verschiedenen erforderlichen Frequenzen dargestellt, die in dem oben beschriebenen Modell eingestellt werden können. Entsprechende Messungen sind auch in den Bildern verfügbar.
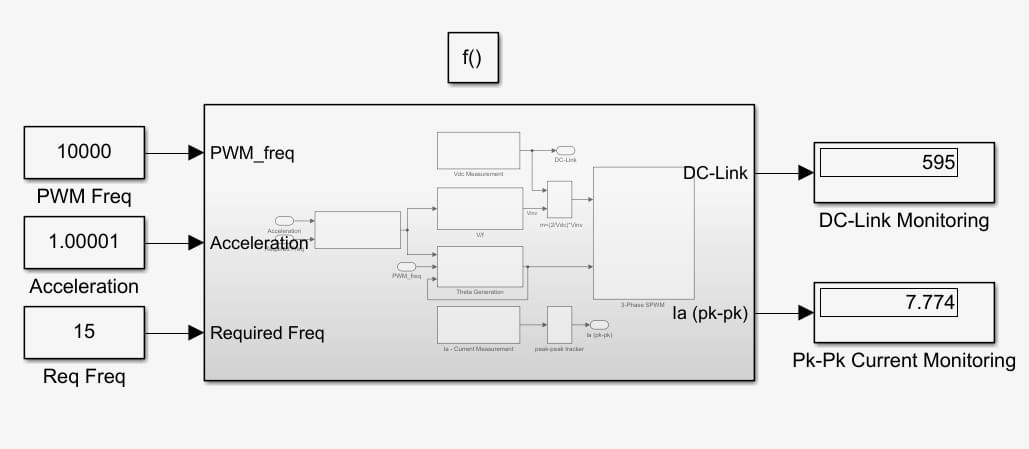
Überwachen und Abstimmen #
Wenn ein Host-Rechner mit der Zielplatine verbunden wird, können die Ergebnisse mit Hilfe der Anzeige in MATLAB/Simulink überwacht und debuggt werden. Klicken Sie für Tune and Monitor auf das grüne Symbol auf der Registerkarte Hardware.

- Die analoge Messung der Zwischenkreisspannung und des Spitzen-Spitzen-Stroms (Ia) wird in Simulink mit dem Display-Block überwacht.
- Erforderliche Frequenz, PWM-Frequenz und Beschleunigung können in Echtzeit über Konstantblöcke variiert werden.