Introducción
PE-RCP Box es una solución de creación rápida de prototipos de control basada en el microcontrolador TI C2000 F28379D, diseñada específicamente para admitir la programación basada en bloques en MATLAB/Simulink y PSIM, lo que la convierte en un elemento esencial para el desarrollo de algoritmos de control para sistemas electrónicos de potencia. Esta guía describe cómo iniciarse en la programación MATLAB/Simulink en PE-RCP Box.
*Nota: Este documento también es aplicable al PE-RCP.
Requisitos previos
Las siguientes herramientas son requisitos previos para comprender y poner en práctica el ejemplo que se ofrece en este artículo:
- Caja PE-RCP
- MATLAB R2019b o posterior
- Versión 11 de Code Composer Studio
Visión general del hardware
PE-RCP Box puede utilizarse para implementar algoritmos de control en hardwares de electrónica de potencia, así como en sistemas Hardware in Loop (HIL). También permite el diagnóstico y la notificación de fallos a través de diferentes enlaces/puertos disponibles como fibra, CAN, USB y conectores hembra DB-50/ DB-37.
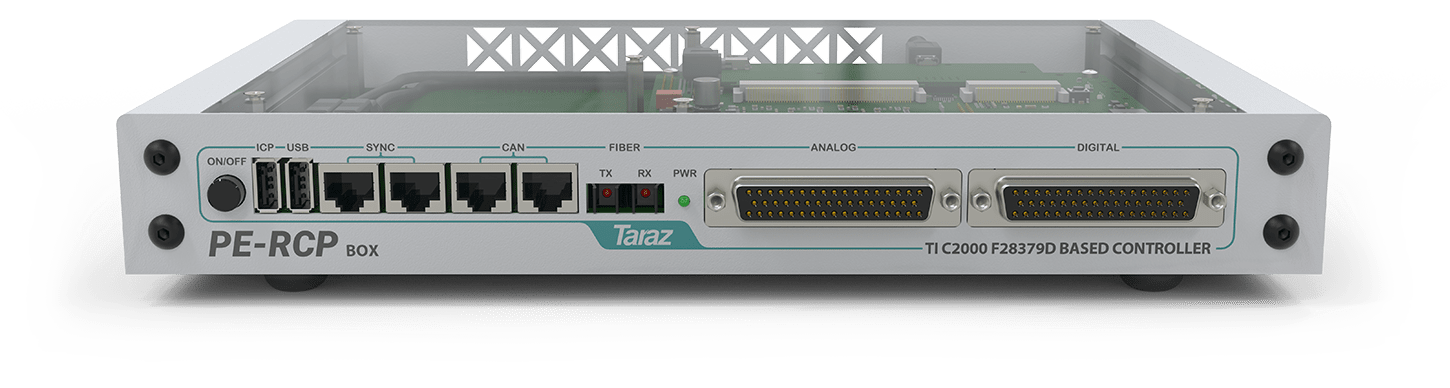
Siga estos pasos para preparar PE-RCP Box para ejecutar la aplicación de demostración:
- Encienda la caja PE-RCP con un adaptador de 15 V.
- Conecte el ICP USB al ordenador mediante un cable USB de tipo A.
- Pulse el botón ON/OFF del panel frontal.
Paquete de soporte C2000 para MATLAB #
Instale Embedded Coder Support Package for Texas Instruments C2000 Processors para MATLAB. Asegúrese de conectarse a Internet antes de continuar.
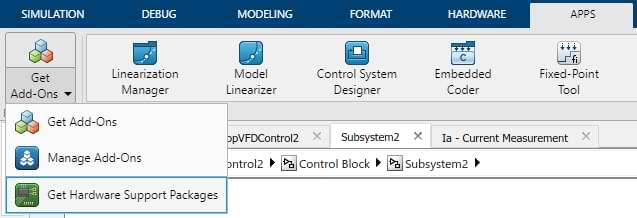
Paso 1: Haga clic en Get Hardware Support Package en la pestaña "Apps":
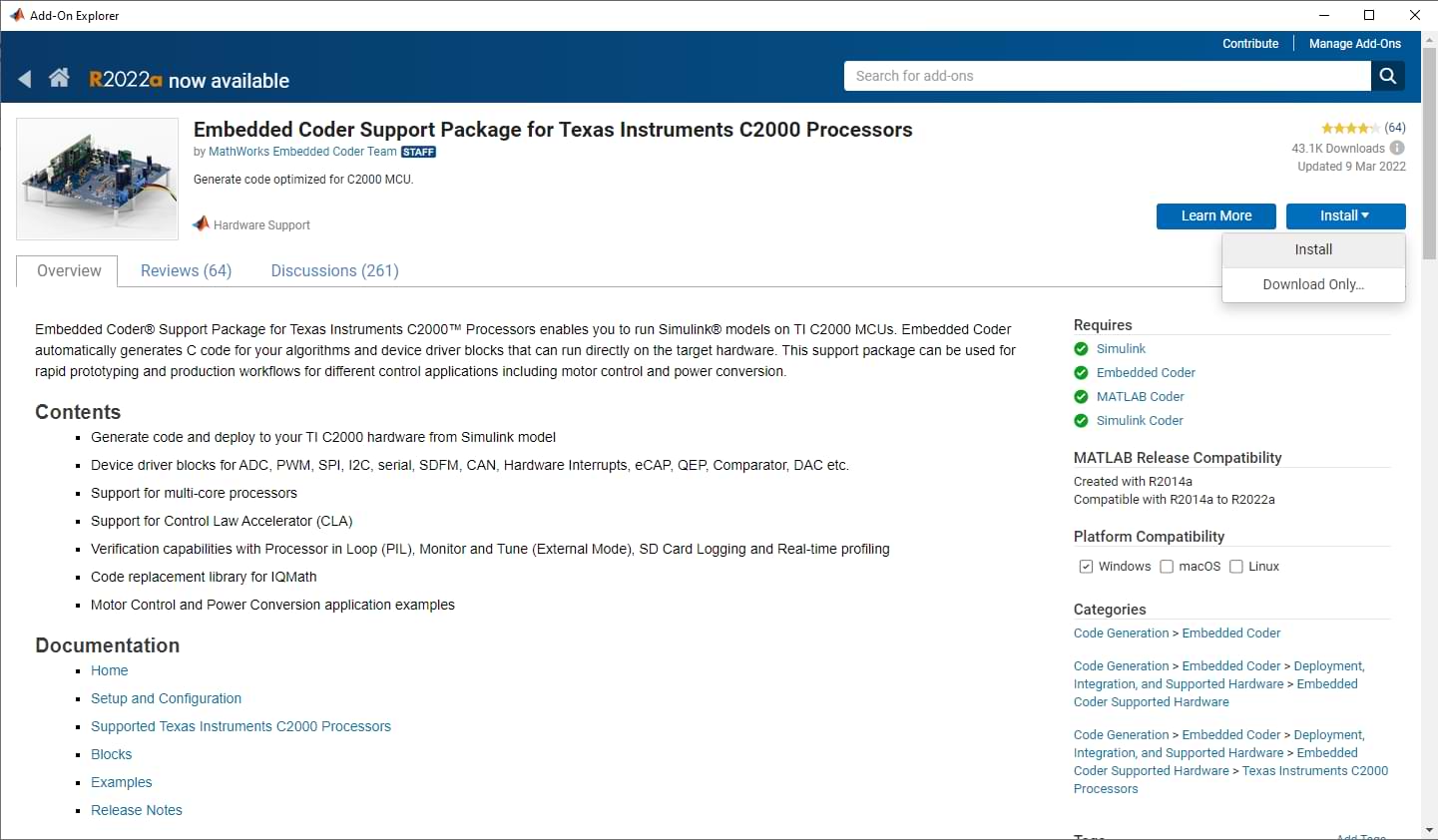
Paso 2: Seleccione "Embedded Coder Support Package for Texas Instruments C2000 Processors" y pulse Instalar:
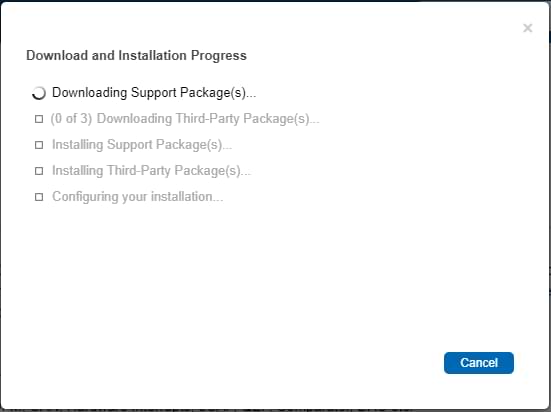
Paso 3: Una vez iniciada la instalación, la siguiente ventana muestra el estado de la instalación:
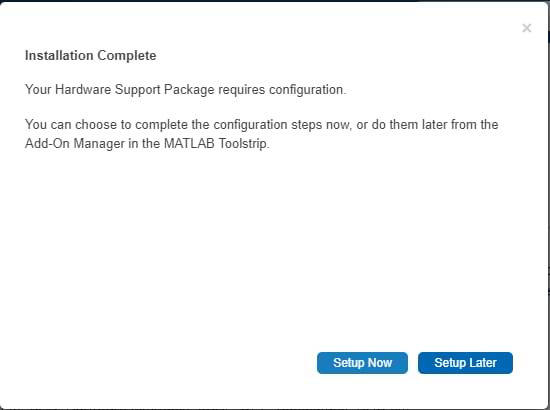
Paso 4: Una vez finalizada la instalación, haga clic en "Instalar ahora":
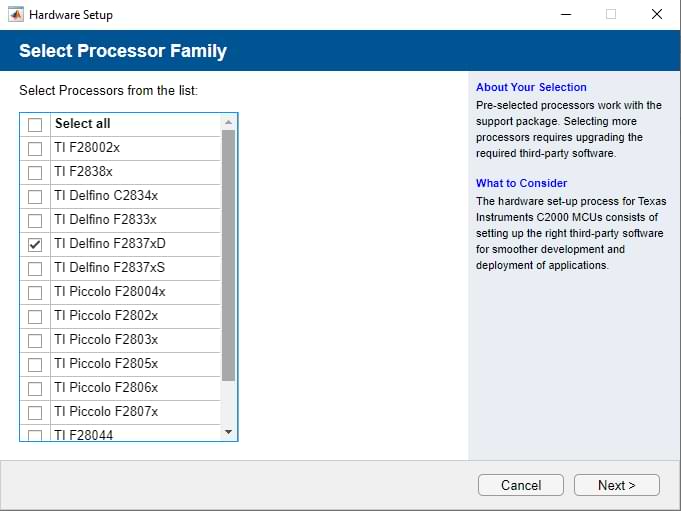
Paso 5: Seleccione TI Delfino F2837xD en Familia de procesadores y haga clic en "Siguiente":
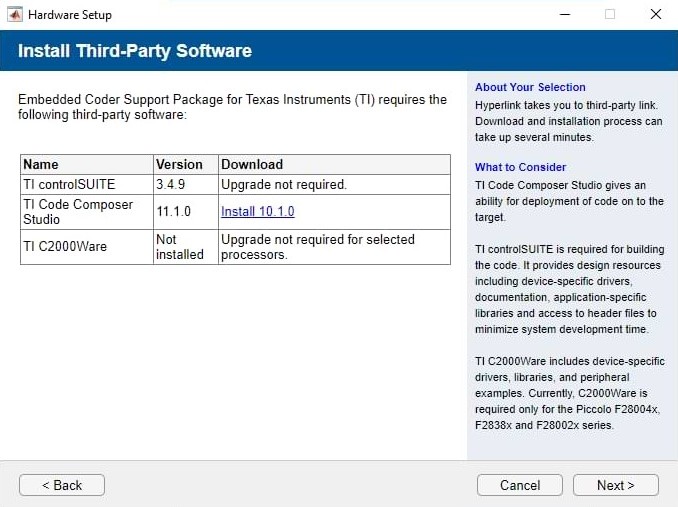
Paso 6: Instale el software de terceros necesario y haga clic en "Siguiente":
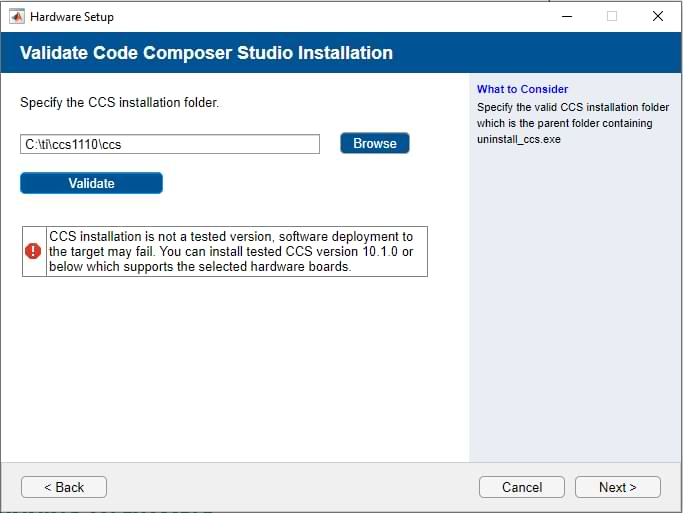
Paso 7: Para la Carpeta de Instalación CCS, haga clic en "Validar" (Ignore la advertencia) y luego haga clic en "Siguiente":
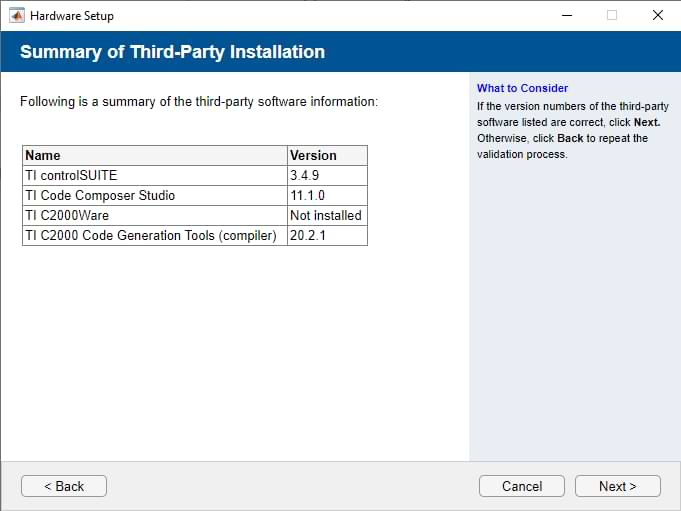
Paso 8: Revise el resumen de la instalación y haga clic en "Siguiente" para finalizar la instalación:
Ejecución del control V/f Ejemplo #
Este documento utiliza "PE-RCP V/f Control Example" para demostrar el uso con PE-RCP Box. Asegúrese de instalar todas las herramientas necesarias antes de continuar.
Paso 1: Descargue y abra el ejemplo adjunto.
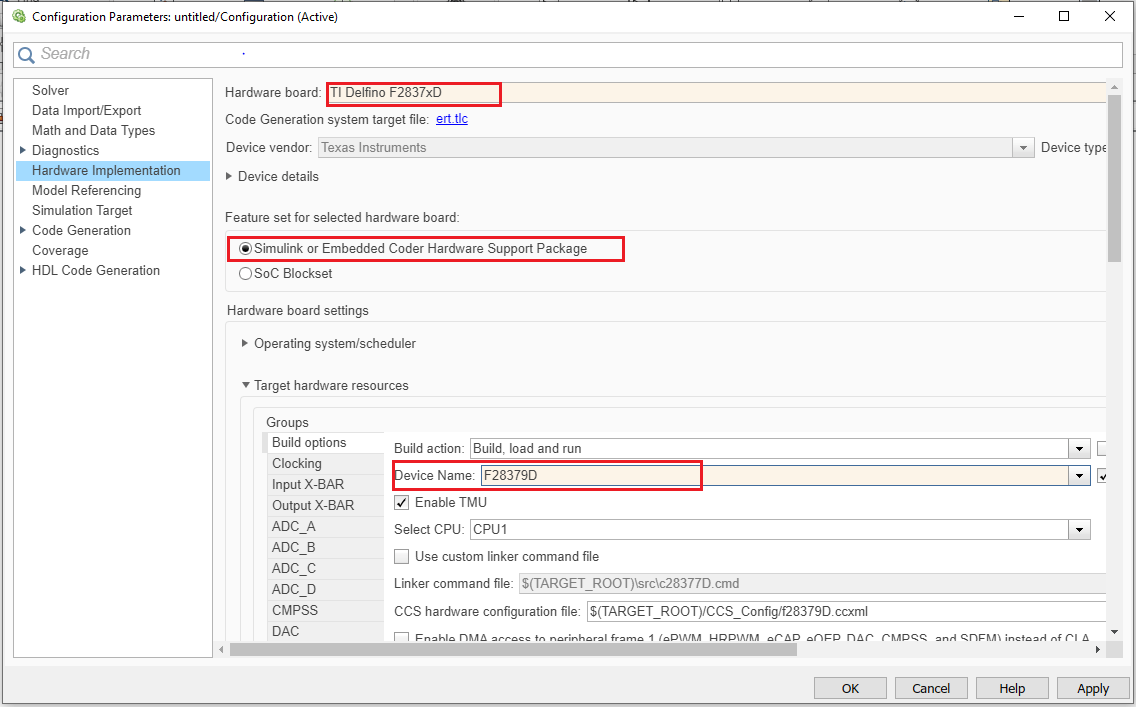
Paso 2: Asegúrese de que los ajustes de hardware son los siguientes:
Paso 3: Haga clic en Build, Deploy y Start. El algoritmo comenzará a cargarse en el buzón PE-RCP:

Aplicación
Esta sección proporciona la implementación práctica del Control V/f en motores de inducción trifásicos.
Equipo necesario
Para verificar de forma práctica el funcionamiento del controlador V/f se necesita el siguiente equipo.
- Laboratorio PE (PLB-6PH)
- Carga trifásica (Motor de inducción/Inductores)
- Fuente de alimentación CC
Detalles de la aplicación
PE-RCP Box requiere una etapa de potencia externa y la carga trifásica para la implementación de este ejemplo. En esta guía se describen los resultados del control VFD en PE-Lab (PLB-6PH) con un motor de inducción trifásico como carga.
Este ejemplo demuestra los siguientes conceptos:
- El control V/f es un algoritmo de control de velocidad para motores de inducción trifásicos, lo que significa que la relación V/f siempre permanece constante. Si la frecuencia disminuye, la tensión de salida disminuye y viceversa.
- La tensión del enlace CC no afecta a la tensión de salida. En su lugar, regula el índice de modulación para mantener constante la tensión de salida.
En este ejemplo, el cambio de frecuencia se realiza siempre con un factor de aceleración designado, lo que evita la necesidad de corrientes instantáneas muy elevadas.
Este ejemplo utiliza los siguientes bloques TI C2000 para la implementación:
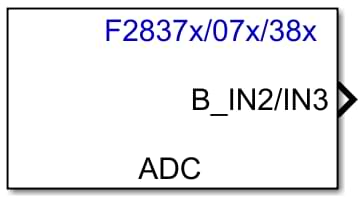
Bloque ADC #
Un bloque ADC individual controla la conversión analógica a digital de un único canal analógico. Este bloque proporciona los parámetros para seleccionar el módulo relevante, la resolución y la señal de disparo para el canal analógico requerido. Si es necesario, también se puede activar la interrupción del ADC para un canal.
En este ejemplo, el ADC de 16 bits lee la medición de la tensión de enlace de CC y la corriente de fase. Ambas conversiones se activan desde el bloque ePWM1, mientras que el final de la conversión para la medición de la tensión de enlace de CC genera la señal de interrupción.
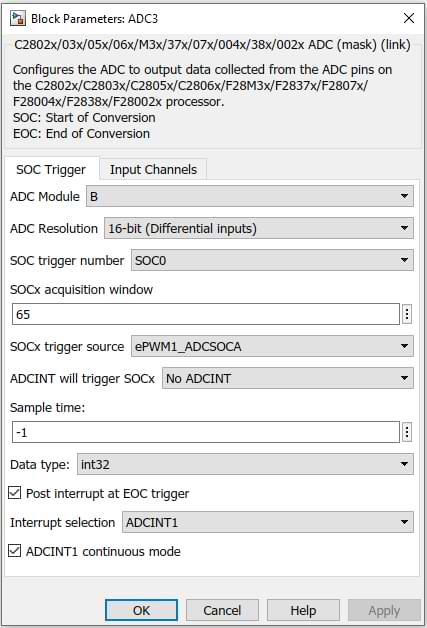
Para más información, consulte el capítulo 11 de este documento: https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf.
Interrupción de hardware #
El Microcontrolador F28379D tiene una interrupción de hardware para disparar la acción en diferentes eventos. La selección de la interrupción se basa en la tabla de vectores PIE. Los detalles relativos a la tabla de vectores PIE se pueden ver en el siguiente enlace:
https://www.mathworks.com/help/supportpkg/texasinstrumentsc2000/ref/c28xhardwareinterrupt.html
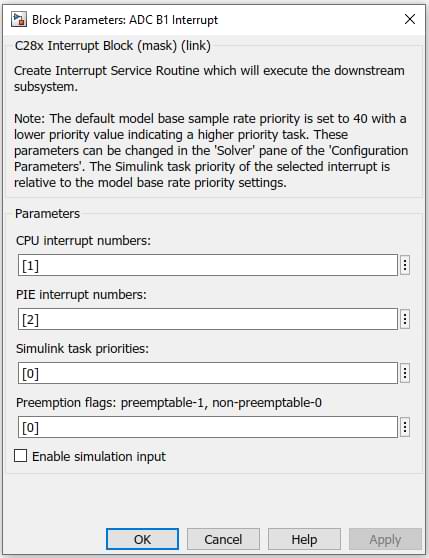
En este ejemplo, el bloque de interrupción activa el algoritmo de control; por lo tanto, calcula los ciclos de trabajo para el siguiente ciclo PWM. Este ejemplo utiliza la interrupción de finalización de conversión en la medición de voltaje de DC-Link.
ePWM Bloque #
El bloque ePWM controla la señal PWM. Cada bloque contiene dos señales PWM: ePWMA y ePWMB. La sección Event Trigger se puede utilizar para la Interrupción de Hardware ePWM y la sincronización con otros módulos. La Unidad de Banda Muerta controla el tiempo muerto entre el par PWM.
En este ejemplo, el bloque ePWM genera las señales PWM y envía la señal de inicio de conversión (SOC) a los módulos ADC.
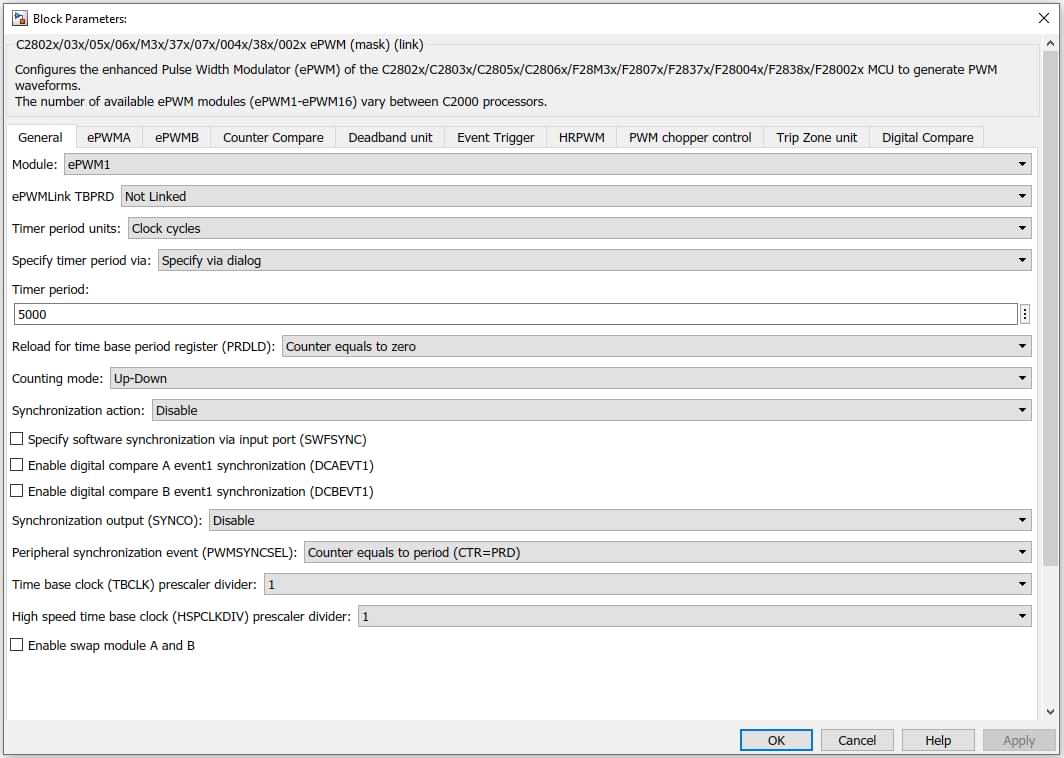
Para más información, consulte el capítulo 15 de este documento: https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf
Especificaciones
En la tabla siguiente figuran las especificaciones de aplicación pertinentes:
| PARÁMETRO | VALOR |
| Frecuencia PWM | 10 KHz |
| Salida Frecuencia requerida | 15 Hz - 25 Hz |
| Tensión de enlace CC | 300V - 600V |
| Potencia nominal del motor trifásico | 380VL-L /50Hz |
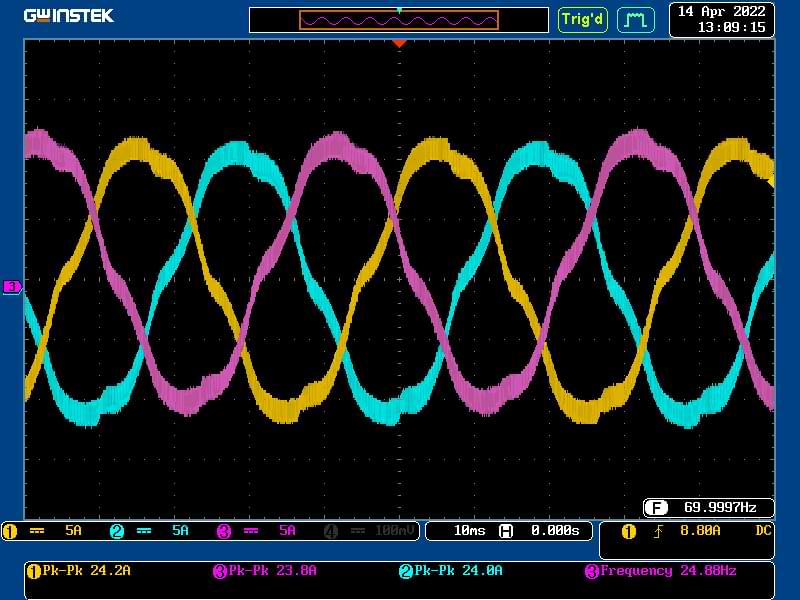
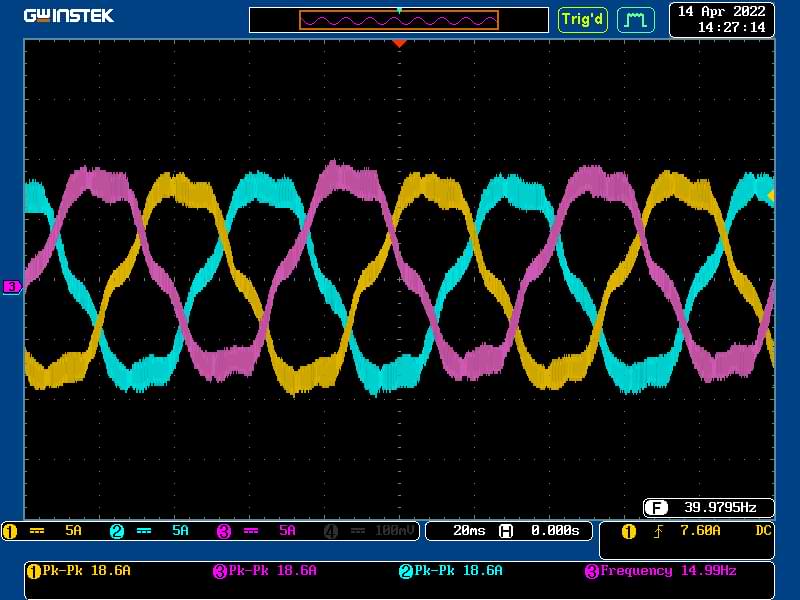
Resultados
Esta sección proporciona las formas de onda de la corriente de salida para tres fases a diferentes frecuencias requeridas que pueden ajustarse en el modelo descrito anteriormente. Las mediciones correspondientes también están disponibles en las imágenes.
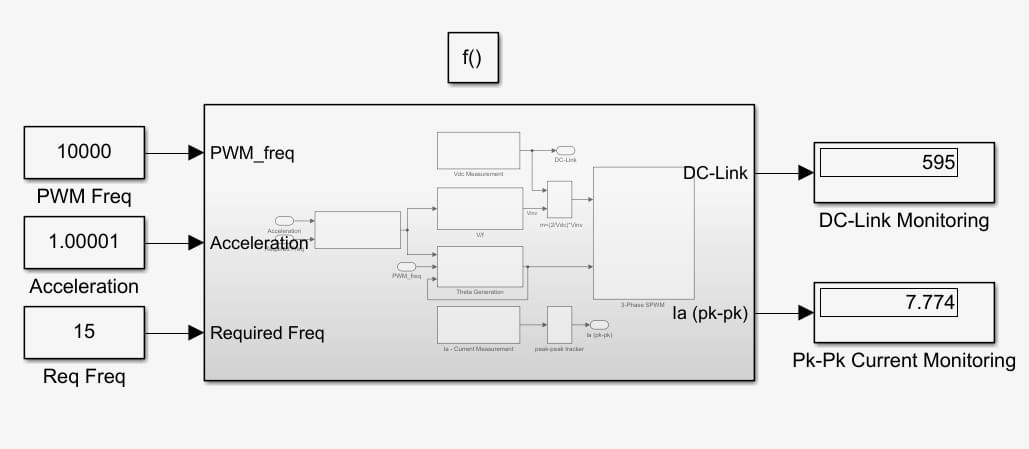
Supervisar y ajustar
Cuando una máquina host se conecta con la placa de destino, los resultados pueden ser monitorizados y depurados utilizando la visualización en MATLAB/Simulink. Para sintonizar y monitorizar, haga clic en el icono verde de la pestaña de hardware.

- La medición analógica de la tensión de enlace de CC y la corriente pico-pico de la pata (Ia) se monitoriza en Simulink mediante el bloque Display.
- La frecuencia requerida, la frecuencia PWM y la aceleración pueden variarse en tiempo real mediante bloques constantes.