はじめに#
このアプリケーション例では、MATLAB Simulinkを開発環境として使用し、PE-RCPボックス上に昇圧コンバータを搭載した三相グリッドタイインバータの実装を示します。
必要な道具
入門ガイドに記載されている手順に従って、MATLAB 環境を準備してください。この応用例で説明する例を理解し、実行するためには、以下のツールが必要です:
- MATLAB R2019b またはそれ以降
- C2000 プロセッサ用 MATLAB Embedded Support パッケージ
ハードウェアの概要
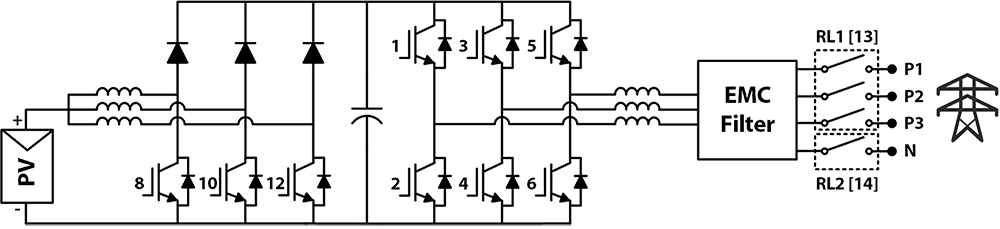
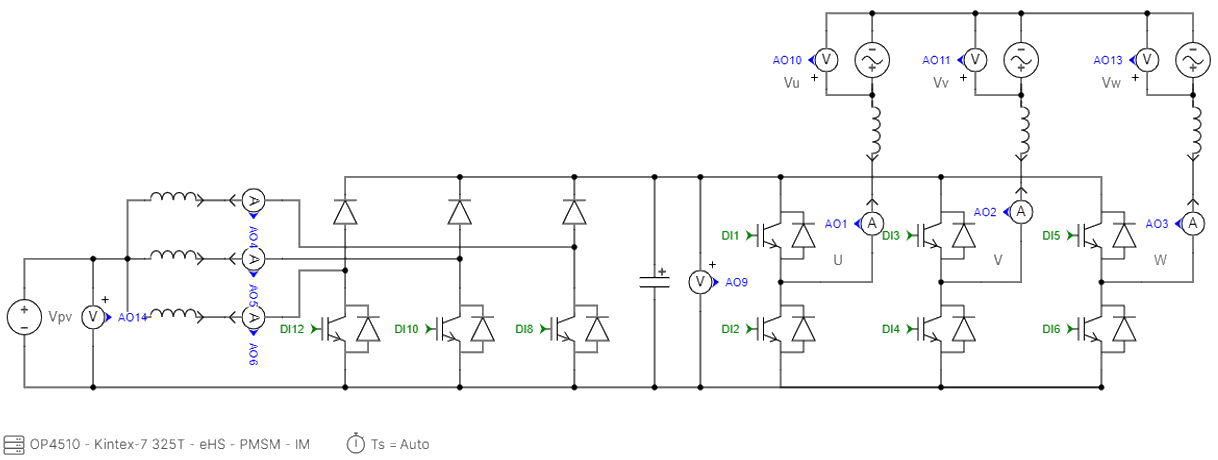
この例では、2レベル・インバータ、昇圧コンバータ(3コンバータ並列)、断路リレー付きEMCフィルタを使用している。コンバーター回路の簡略回路図を以下に示す:
コントロールの実装
必要条件
本実施例の実用的な検証には、以下の機器・設備が必要である:
- PE-RCPボックス
- OP4510 HILリアルタイム・シミュレータ
- PELAB-6PH
- プログラマブルDC電源
- 三相グリッド電源
動作条件
以下の表は、関連する実装仕様である:
| パラメータ | 価値 |
| PWMスイッチング周波数 | 40 kHz |
| デッドタイム | 200n秒 |
| DCリンク電圧セットポイント | 720 VDC |
| グリッド電圧 | 380 VAC L-L |
| グリッド周波数 | 50 Hz |
| DC入力電圧 | 180 V - 200 V |
制御アルゴリズム
インバーター制御
三相系統連系インバーターはベクトル電流制御で制御される。下図は、実装されたアルゴリズムの基本制御図です:
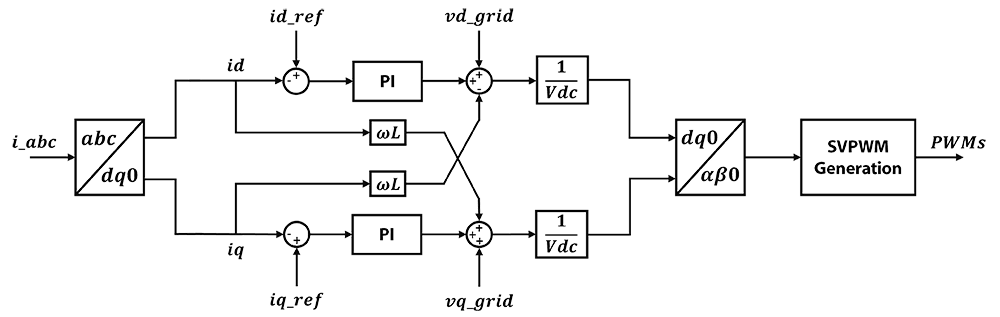
測定されたグリッド位相電圧と電流は回転基準(DQ)フレームに変換されます。位相ロックループ(PLL)は、変換に使用されるグリッド位相角を推定するために使用されます。その後、位相電流の誤差を補正するためにPIコントローラが使用されます。その後、誘導減結合補償と正規化が計算されたデューティサイクルに追加されます。その後、SVPWM手法を用いてインバータ・スイッチのゲート信号を生成します。
ブースト・コンバーター・コントロール
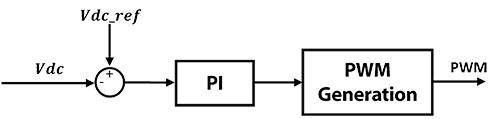
所望のDCリンク電圧を達成するために、単純なPIコントローラが昇圧コンバータ制御に実装されています。この制御は非常に単純であり、インダクタの飽和とレグ電流の過負荷を回避するためにハードウェアベースの電流保護を追加する必要があることに注意してください(PELab-6PHシステムで利用可能)。また、インダクタの飽和による短絡を避けるために、入力電圧に応じて昇圧コンバータPWMの最大デューティ・サイクル制限を適用することも不可欠です。設定値よりも高い入力電圧がインバータに供給される場合、昇圧コンバータはインバータの動作に必要なくなります。まとめると、インバータからグリッドへの適切な電流の流れを確保するためには、DC-Link電圧はグリッドのピーク電圧より少なくとも50V高くなければなりません。
ワークフロー
PE-RCPボックスは、MATLAB Simulinkから直接プログラムすることができ、制御システムのプロトタイプを迅速に作成することができます。実装されたシステムの基本的なワークフロー図を以下に示します:
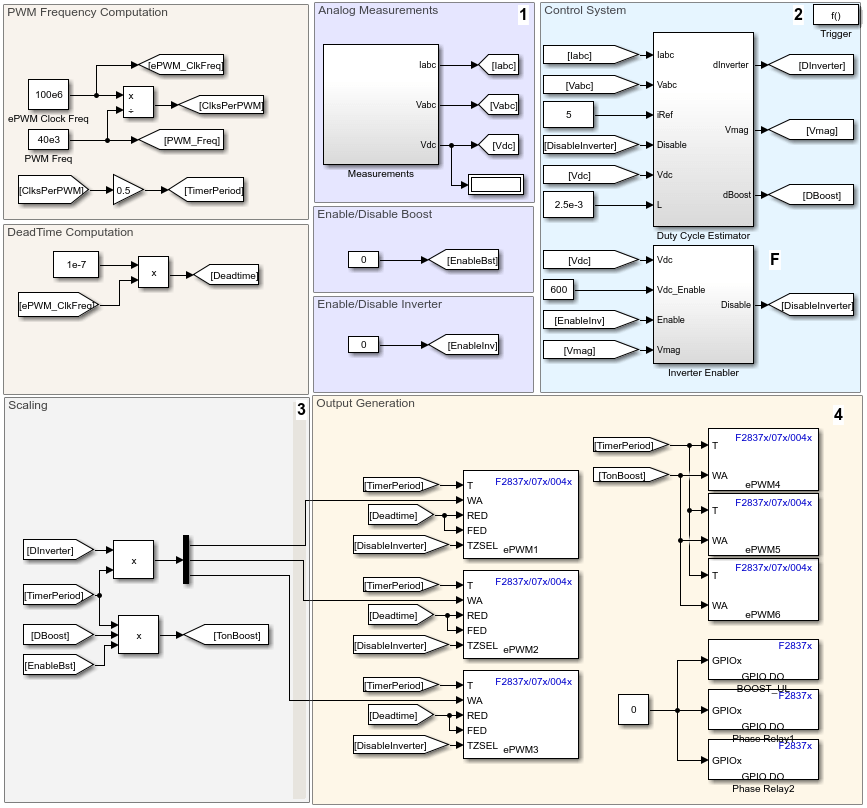
以下のセクションでは、MATLAB Simulinkモデルで使用される重要なブロックの概要を説明します:
1.アナログ測定#.
C2000 ADCブロックは、グリッド相電圧、脚電流、DC-リンク電圧の測定に使用されます。
2.制御システム
制御システムには、インバータと昇圧コンバータに必要なデューティ・サイクル値を計算するためのデューティ・サイクル・エスティメータ・ブロックがあります。また、保護用のEnable/Disableブロックもあります。以下は内部ブロックの概要です:
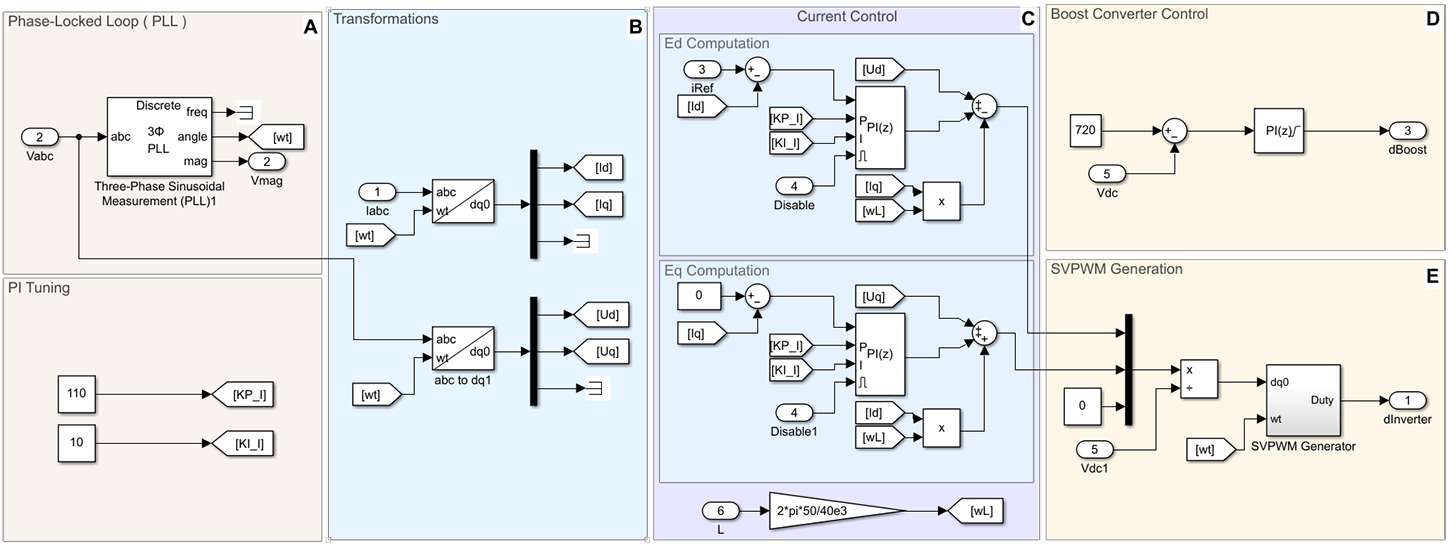
A.位相同期ループ(PLL)#.
PLLブロックは、制御をグリッド位相角に同期させるために使用されます。取得された位相角は、パーク/クラーク変換、およびグリッド位相電圧と注入位相電流の同期に使用されます。
B.変形#.
静止フレーム(ABCとαβ)と回転フレーム(DQ)間の変換を行う。
C.電流制御
変換後に得られるDQ-電流に対してPIベースの電流制御が実装される。ロバストな電流制御のために誘導減結合補償が実装されている。
D.昇圧コンバータ制御#.
昇圧コンバータのデューティ・サイクルを生成するPIコントローラを実装
E.SVPWM生成#.
空間ベクトルパルス幅変調(SVPWM)を実装し、三相インバータに高電圧、支配的な高調波の高い低減、および低全高調波歪みを提供します。
F.有効/無効制御#.
イネーブル/ディセーブル制御は以下のように行われる:
ブースト・コンバーター: システムで使用されていない場合、ブースト・コンバーターを有効または無効にする手動オン/オフ・コントロール。
リレー:パワーモジュールにダメージを与えるグリッドからの突入電流を避けるため、DC-Linkが充電されていることを確認してからリレーをオンにします。DC-Linkが充電されていない場合、インバータースイッチボディダイオードが制御されない整流器として機能するため、防止できない短絡電流がインバーターに流れ、スイッチが永久的に損傷する可能性があるため、これは絶対に必要です。
三相インバータ:以下の条件を満たす場合のみ有効:
- DCリンクはプリチャージされており、グリッド電圧よりも高い電圧を持っている。
- 測定されたグリッド電圧の大きさが指定された範囲内にある。
- インバータはユーザーによって有効化される。
3.スケーリング
三相インバータと昇圧コンバータのデューティ・サイクルは、ePWMブロック用のカウンタ信号を生成するために、本システムのタイマ周期で乗算される。
4.出力生成#.
C2000 ePWMブロックは、昇圧コンバータと三相インバータのPWM信号を生成するために使用されます。トリップゾーン・サブモジュールは、安全なスイッチングに使用されます。
実施と結果
この応用例は、HILリアルタイム・シミュレータ(OPAL-RT Technologies社製OP4510)と、パワーエレクトロニクス迅速開発システムPELab-6PHを使用した実際のパワーエレクトロニクス・ハードウェアでテストされています。
HIL リアルタイム・シミュレーション (OP4510)#.
電源、パワーエレクトロニクス、グリッドは、OPAL-RT Technologies社が提供するOP4510 HILリアルタイムシミュレータを使用してシミュレーションされる。

HILシミュレーションは、eHS FPGAベースのソルバーを使用してRT-LABで実行されます。以下の電源回路は、OPAL-RT回路図エディタを使用して実装されています:
結果
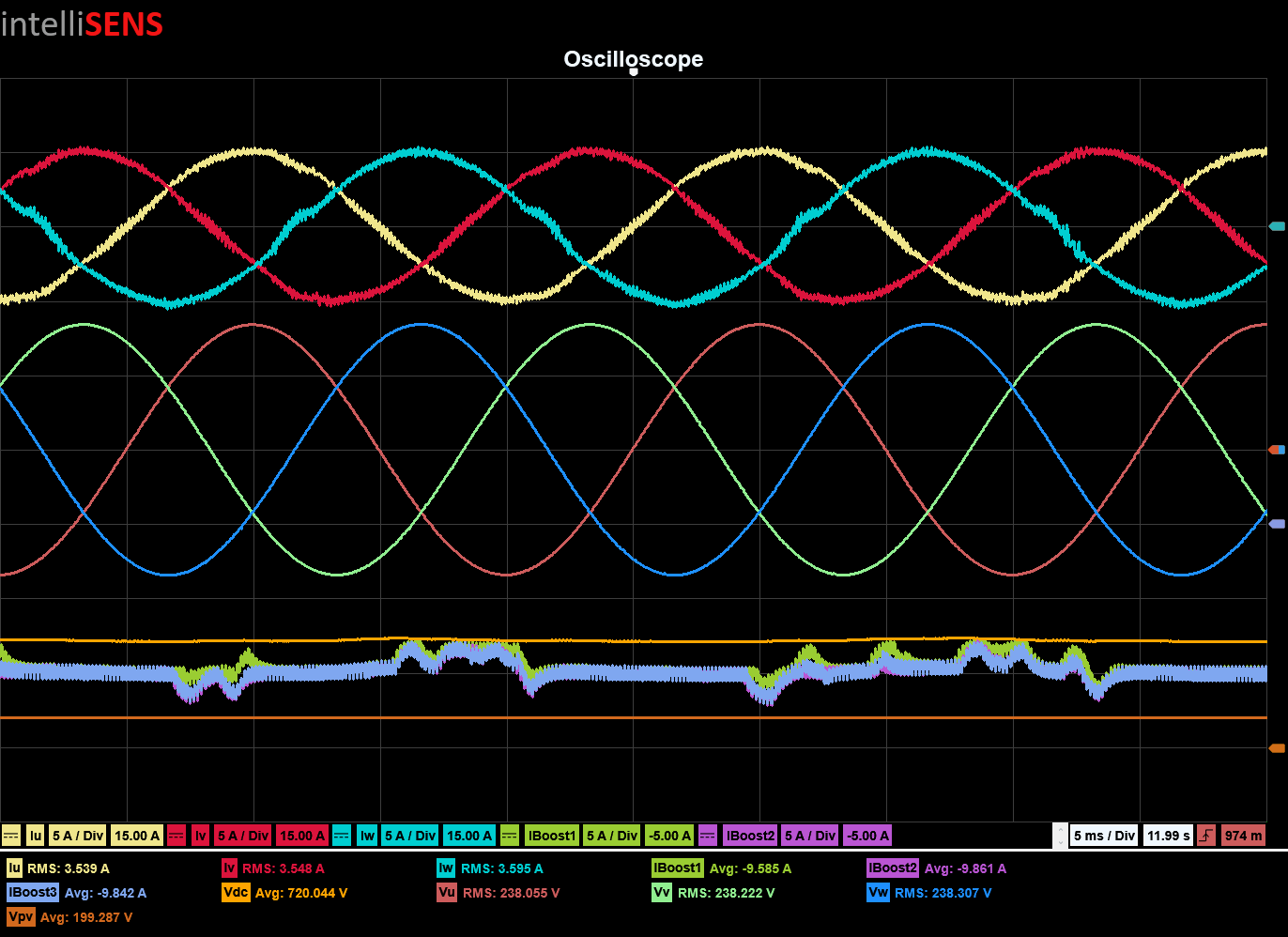
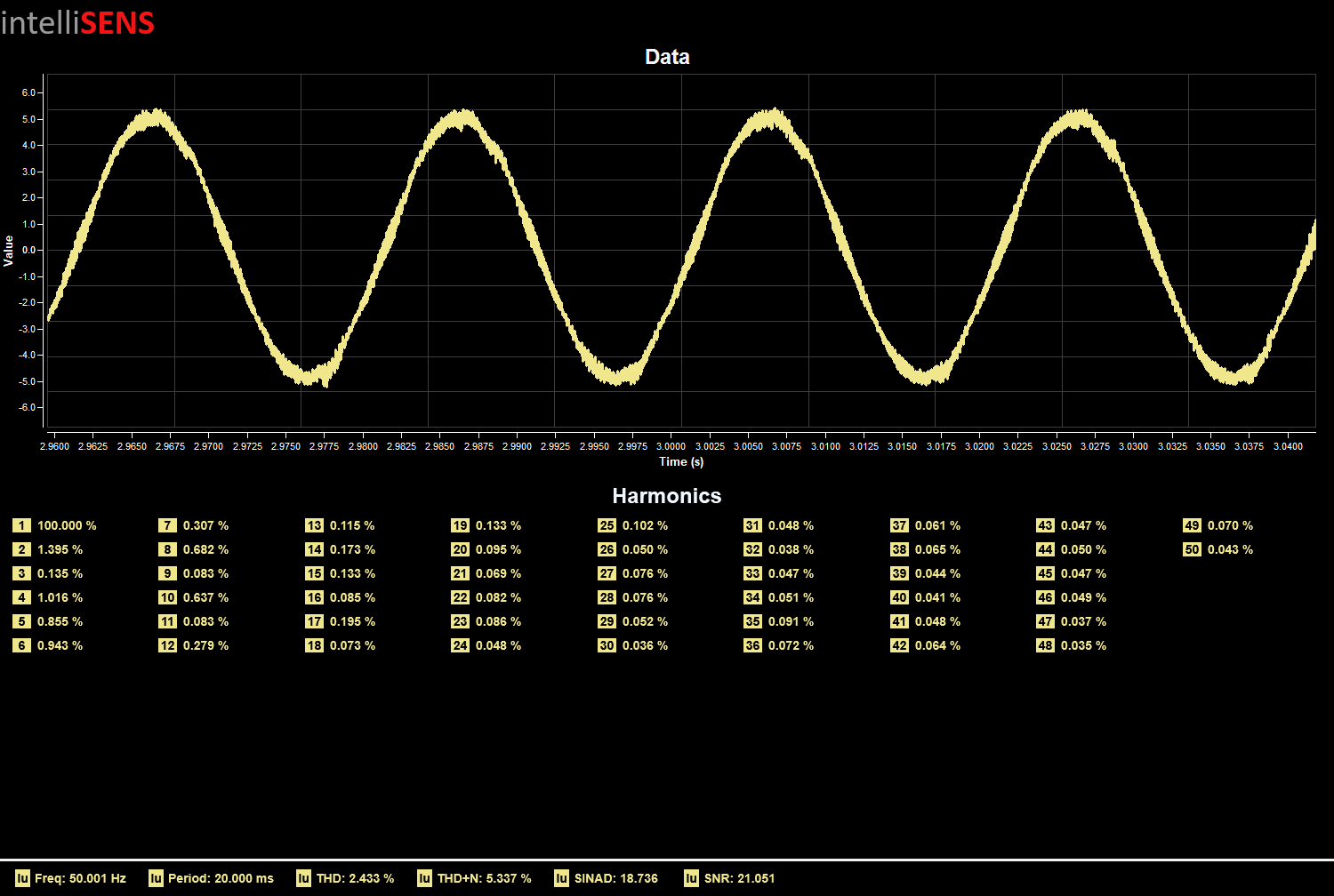
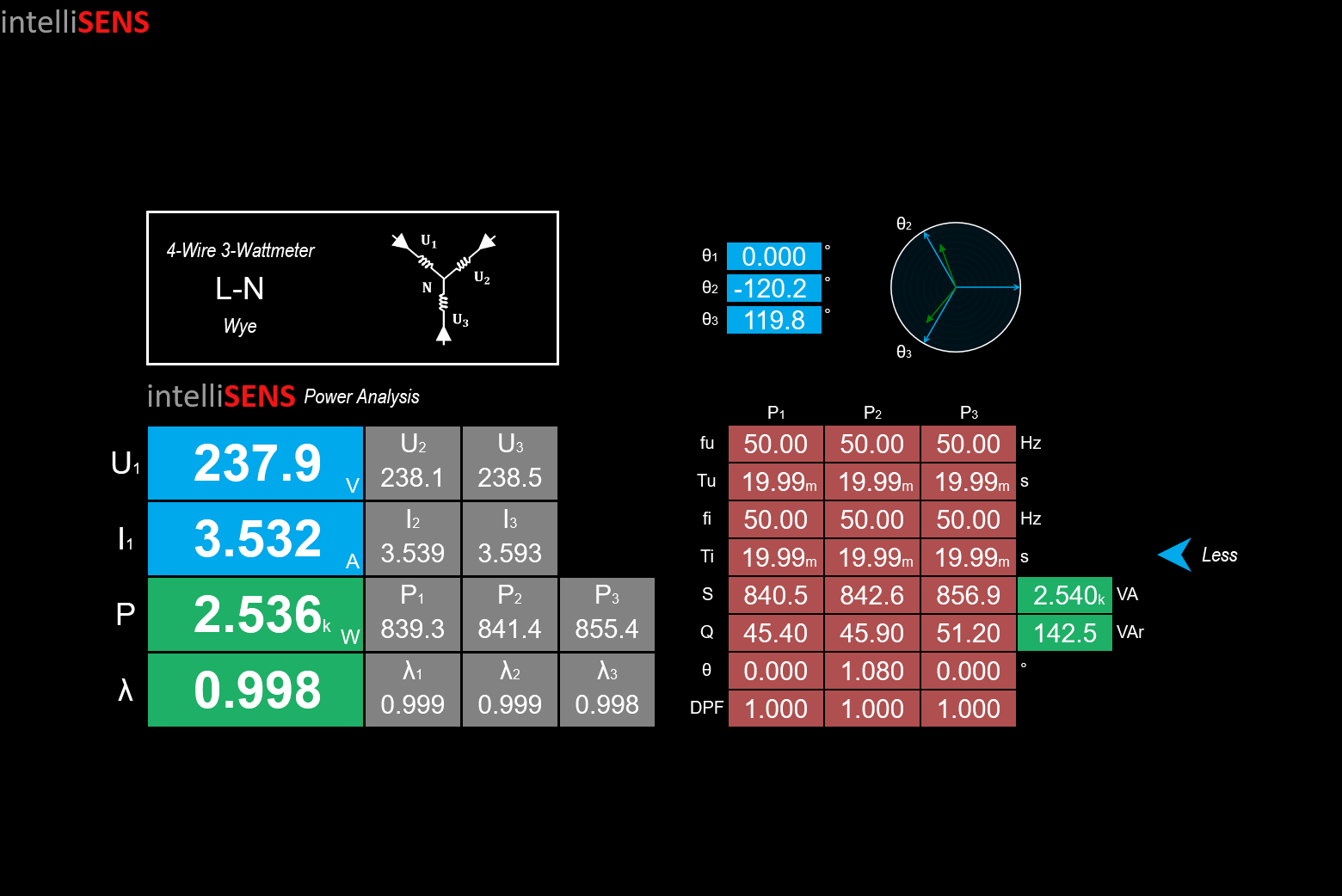
実施結果は PELab-6PH システムの一部である PEController を使って取得される。PEController はintelliSENSリアルタイムモニタリングと記録ソフトウェアとの統合を提供します。以下は、5 A ピーク(~3.5 A RMS)基準点の結果です。PELabはRCPからHILモードで動作しています。
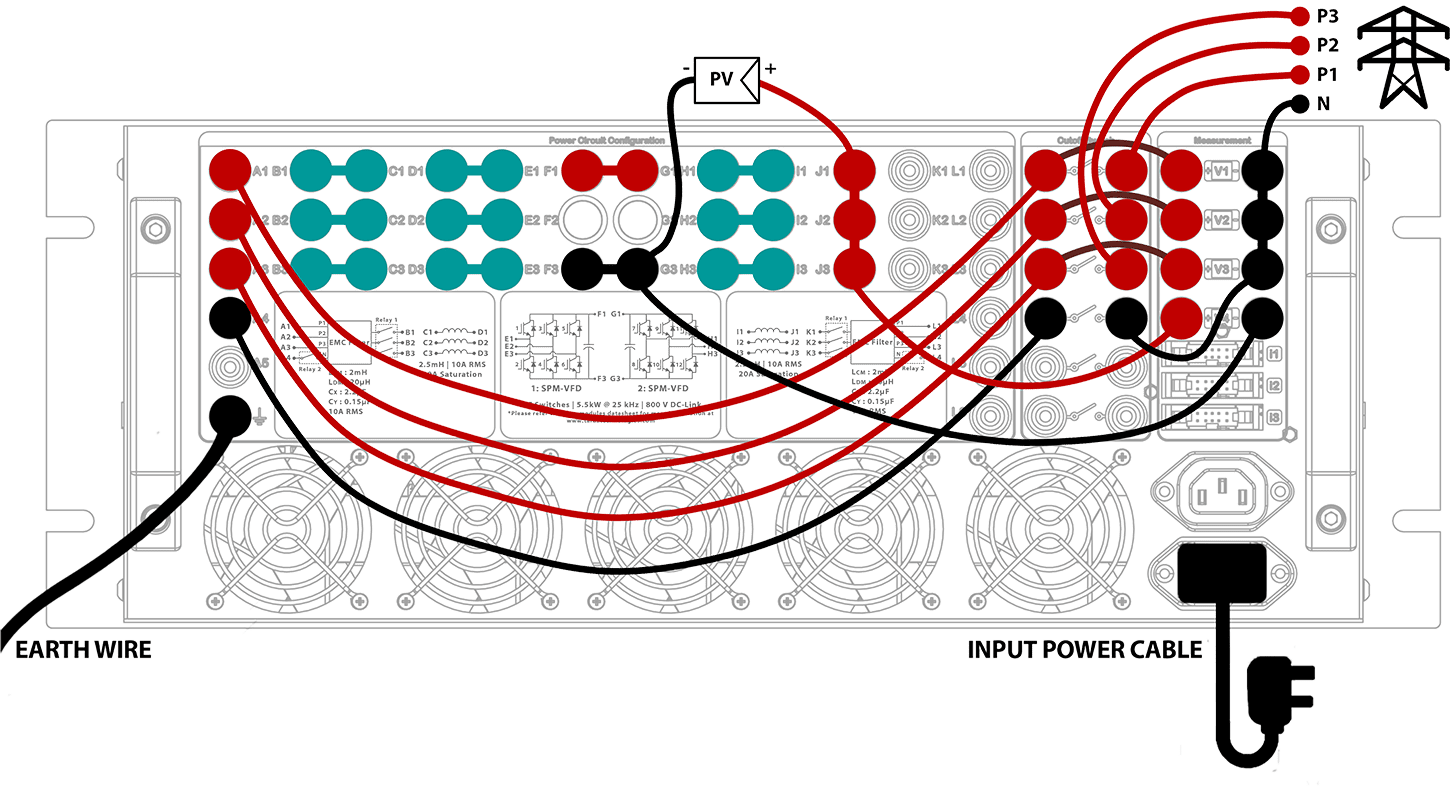
パワーエレクトロニクスハードウェア実装 (PELab-6PH)#
パワーステージのハードウェア実装は、PELabシステムを使用している。PELab-6PH構成は2つの3相インバータを提供する。最初のインバータは2レベル3相インバータとして使用され、2番目のインバータは並列昇圧コンバータとして使用される。インダクタ、EMCフィルタ、リレーもPELab-6PHで使用できます。下図にPELab-6PHの結線図を示します:
警告システムの電源を入れたり切ったりする際は、以下の手順に従ってください。これを怠ると、装置に永久的な損傷を与える可能性があります。
ターンオンの手順
- PELab システムのすべての保護機能が有効になっており、DC-Link が放電されていることを確認してください。
- PE-RCPボックス上のSimulinkモデルをアップロードします。
- モデルで昇圧コンバータとインバータの制御が無効になっていることを確認してください。
- 入力DC電源をオンにする。
- モデルから昇圧コンバータを有効にします。DC-Linkが希望の電圧で調整されていることを確認してください。
- カットオフスイッチをオンにしてグリッドに接続し、PLLが同期するのを約2秒間待ちます。
- Simulinkモデルからインバータを有効にする。
- インバータが有効になると、注入する基準電流を変更することによって、グリッド・タイ・インバータの性能を監視することができる。
オフにする手順
- Simulinkモデルからインバータを無効にする。
- カットオフスイッチを切り、グリッドを切り離す。
- 入力DC電源を切り、DC-Linkが放電するのを待つ。
- モニターを停止し、セッションを調整する。
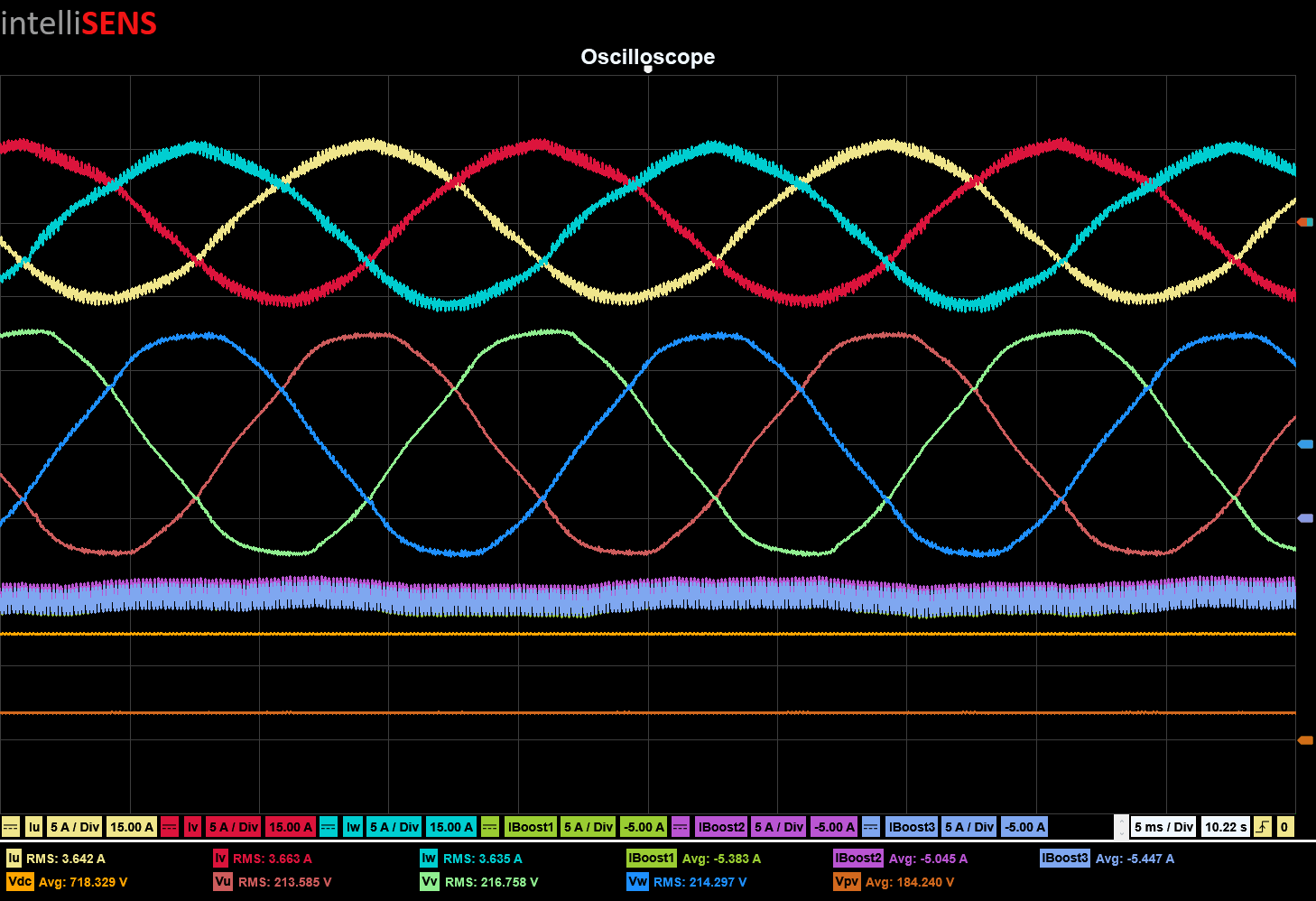
結果
実施結果は PELab-6PH システムの一部である PEController を使って取得される。PEController はintelliSENSリアルタイムモニタリングと記録ソフトウェアとの統合を提供します。以下は、5 A ピーク(~3.5 A RMS)基準点の結果です。PELab は RCP to Power モードで動作しています。
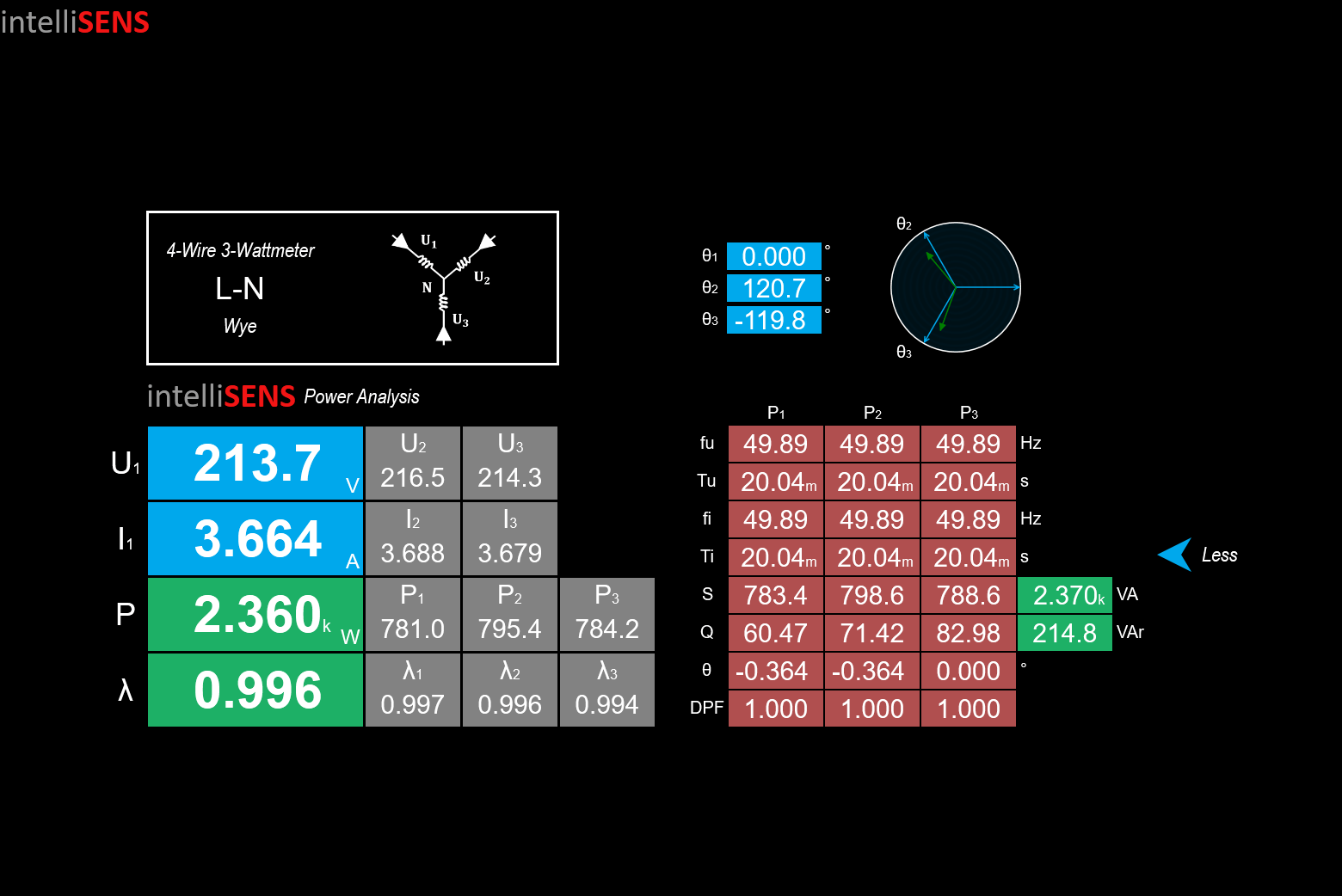
結果サマリー
| パラメータ | HILインプリメンテーション | 電力供給 | 単位 |
| IU | 3.539 | 3.642 | A (RMS) |
| アイブ | 3.548 | 3.663 | A (RMS) |
| 岩 | 3.595 | 3.635 | A (RMS) |
| Iboost1 | 9.585 | 5.383 | A (AVG) |
| Iboost2 | 9.861 | 5.045 | A (AVG) |
| Iboost3 | 9.842 | 5.447 | A (AVG) |
| ヴー | 238.055 | 213.585 | V (RMS) |
| VV | 238.222 | 216.758 | V (RMS) |
| ブイ | 238.307 | 214.297 | V (RMS) |
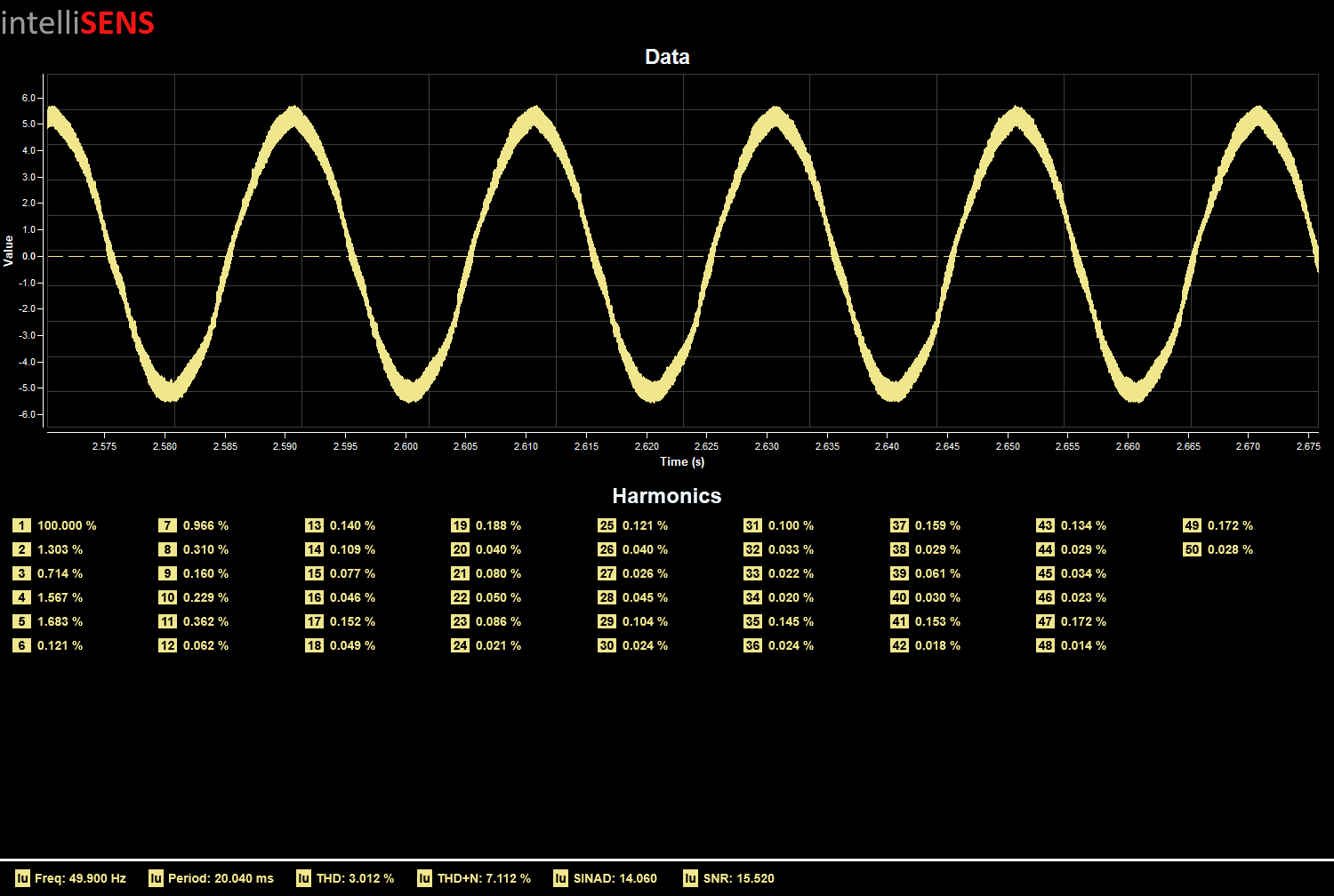
| Iu 電流 THD | 2.433 | 3.012 | % |
| Iu 電流 THD+N | 5.337 | 7.112 | % |
| 出力 | 2.536 | 2.36 | キロワット時 |
| 力率 | 0.998 | 0.996 | - |





