Introduction
Cet exemple d'application démontre la mise en œuvre d'un onduleur de réseau triphasé avec convertisseur boost sur PE-RCP Box en utilisant MATLAB Simulink comme environnement de développement.
Outils nécessaires #
Veillez à préparer l'environnement MATLAB en suivant la procédure décrite dans le Guide de démarrage. Les outils suivants sont nécessaires pour comprendre et mettre en œuvre l'exemple donné dans cet exemple d'application :
- MATLAB R2019b ou plus récent
- MATLAB Embedded Support package pour les processeurs C2000
Vue d'ensemble du matériel #
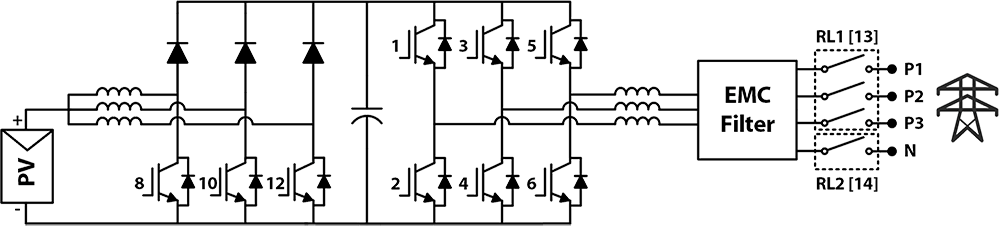
Cet exemple utilise un onduleur à deux niveaux, un convertisseur élévateur (3 convertisseurs en parallèle) et un filtre CEM avec des relais de déconnexion. Un schéma simplifié du circuit du convertisseur est présenté ci-dessous :
Mise en œuvre du contrôle
Exigences #
Les équipements suivants sont nécessaires pour la vérification pratique de cet exemple :
- Boîte PE-RCP
- Simulateur temps réel HIL OP4510
- PELab-6PH
- Alimentation DC programmable
- Alimentation triphasée du réseau
Conditions de fonctionnement #
Le tableau suivant présente les spécifications de mise en œuvre pertinentes :
| PARAMÈTRE | VALEUR |
| Fréquence de commutation PWM | 40 kHz |
| Temps mort | 200 nSec |
| Point de consigne de la tension du lien CC | 720 VDC |
| Tension du réseau | 380 VAC L-L |
| Fréquence de la grille | 50 Hz |
| Tension d'entrée DC | 180 V - 200 V |
Algorithme de contrôle
Contrôle de l'onduleur #
L'onduleur triphasé couplé au réseau est contrôlé à l'aide d'un contrôle vectoriel du courant. La figure suivante illustre le diagramme de contrôle de base de l'algorithme mis en œuvre :
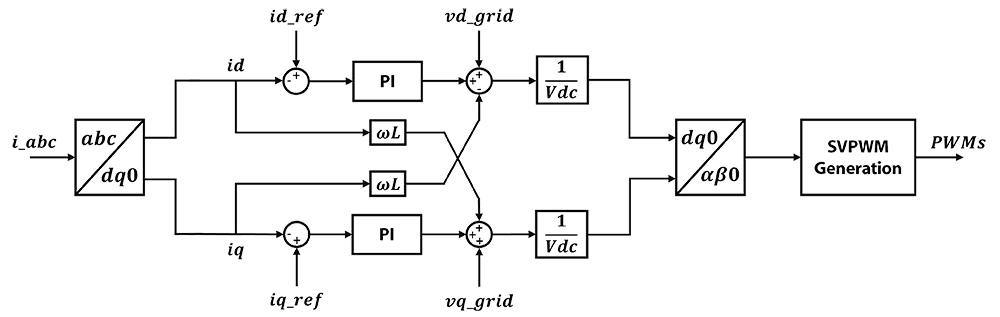
Les tensions et courants de phase du réseau mesurés sont convertis dans le cadre de référence rotatif (DQ). La boucle à verrouillage de phase (PLL) est utilisée pour estimer l'angle de phase du réseau qui est utilisé dans la conversion. Un contrôleur PI est ensuite utilisé pour compenser l'erreur dans les courants de phase. Ensuite, une compensation de découplage inductif et une normalisation sont ajoutées aux cycles de travail calculés. Une technique SVPWM est ensuite utilisée pour générer les signaux de commande des interrupteurs de l'onduleur.
Contrôle du convertisseur Boost #
Un simple contrôleur PI est mis en œuvre pour la commande du convertisseur élévateur afin d'obtenir la tension de liaison CC souhaitée. Veuillez noter que ce contrôle est très simple et nécessitera des protections de courant supplémentaires basées sur le matériel pour éviter la saturation de l'inducteur et la surcharge du courant des branches (disponible dans le système PELab-6PH). Il est également essentiel d'appliquer une limite maximale de rapport cyclique pour le PWM du convertisseur boost en fonction de la tension d'entrée afin d'éviter les courts-circuits dus à la saturation de l'inducteur. Si une tension d'entrée plus élevée que le point de consigne est fournie à l'onduleur, le convertisseur boost ne sera pas nécessaire pour le fonctionnement de l'onduleur. En résumé, la tension de la liaison CC doit être supérieure d'au moins 50 V à la tension de crête du réseau pour garantir un flux de courant correct entre l'onduleur et le réseau.

Flux de travail
La boîte PE-RCP peut être programmée directement à partir de MATLAB Simulink, ce qui nous permet de prototyper rapidement notre système de contrôle. Le diagramme de flux de travail de base du système mis en œuvre est illustré ci-dessous :
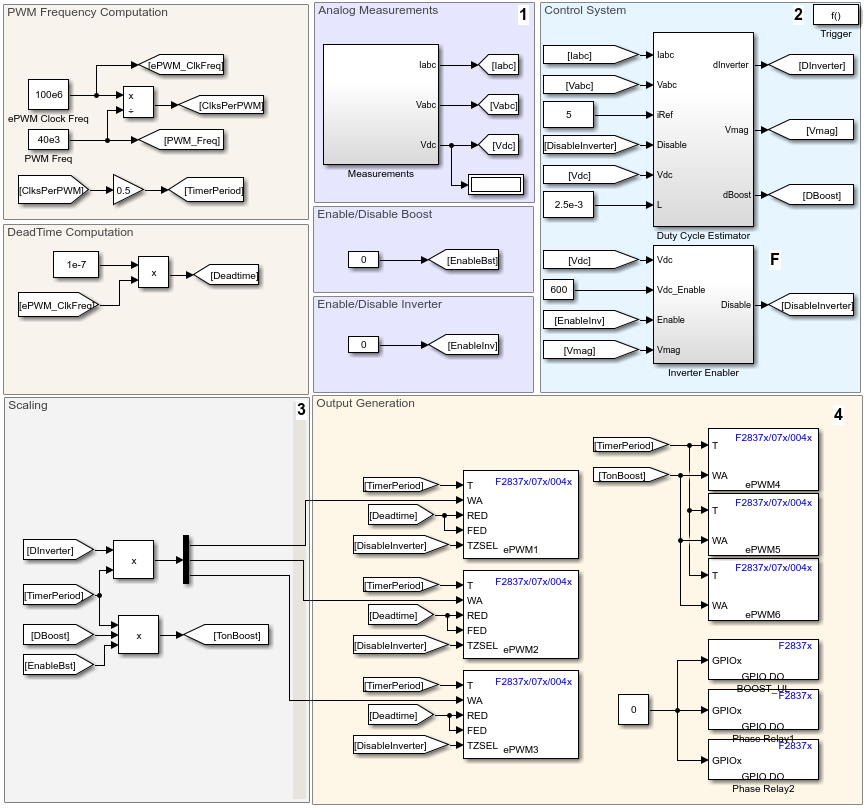
La section suivante donne un bref aperçu des blocs essentiels utilisés dans le modèle Simulink de MATLAB :
1. Mesures analogiques #
Les blocs ADC C2000 sont utilisés pour la mesure des tensions de phase du réseau, des courants de branche et de la tension du lien CC.
2. Système de contrôle
Le système de contrôle comporte un bloc d'estimation du cycle de service utilisé pour calculer les valeurs de cycle de service requises pour l'onduleur ainsi que pour le convertisseur élévateur. Et un bloc d'activation/désactivation pour la protection. Voici un aperçu des blocs internes :
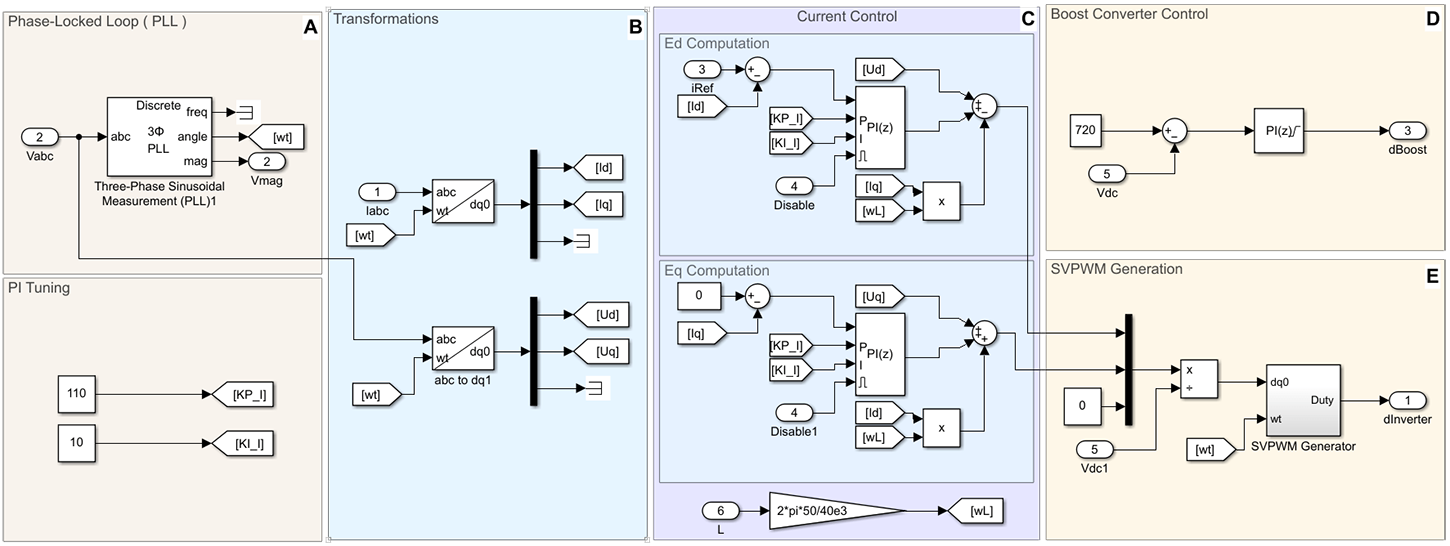
A. Boucle à verrouillage de phase (PLL )
Le bloc PLL est utilisé pour synchroniser la commande avec l'angle de phase du réseau. L'angle de phase acquis est utilisé pour les transformations de Park/Clarke ainsi que pour la synchronisation des tensions de phase du réseau et des courants de phase injectés.
B. Transformations
Implémente des transformations pour convertir les cadres stationnaires (ABC et αβ) et les cadres rotatifs (DQ).
C. Contrôle actuel
Un contrôle de courant basé sur PI est mis en œuvre sur les courants DQ obtenus après transformation. La compensation du découplage inductif est mise en œuvre pour un contrôle robuste du courant.
D. Contrôle du convertisseur Boost
Implémentation d'un contrôleur PI pour générer le rapport cyclique du convertisseur Boost
E. Génération SVPWM
Met en œuvre la modulation de largeur d'impulsion à vecteur spatial (SVPWM) qui fournit une tension plus élevée, une forte réduction des harmoniques dominantes et une distorsion harmonique totale plus faible pour un onduleur triphasé.
F. Contrôle d'activation/désactivation
La commande d'activation/désactivation est mise en œuvre de la manière suivante :
Convertisseur de suralimentation : une commande manuelle marche/arrêt pour activer ou désactiver le convertisseur de suralimentation s'il n'est pas utilisé par le système.
Relais : Les relais ne sont activés qu'après s'être assuré que la liaison CC est chargée afin d'éviter un courant d'appel provenant du réseau qui pourrait endommager les modules de puissance. Notez que cela est absolument essentiel car lorsque le lien CC n'est pas chargé, les diodes du corps des interrupteurs de l'onduleur agissent comme un redresseur incontrôlé et, par conséquent, un courant de court-circuit non évitable peut circuler dans l'onduleur et endommager les interrupteurs de manière permanente.
Onduleur triphasé : il n'est activé que si les conditions suivantes sont remplies :
- La liaison CC est préchargée et a une tension plus élevée que la tension du réseau.
- L'amplitude de la tension de réseau mesurée se situe dans la plage spécifiée.
- L'onduleur est activé par l'utilisateur.
3. Échelle #
Les rapports cycliques de l'onduleur triphasé et du convertisseur élévateur sont multipliés par la période de temporisation de notre système afin de générer un signal de compteur pour les blocs ePWM.
4. Génération de sortie
Les blocs C2000 ePWM sont utilisés pour générer les signaux PWM pour le convertisseur boost et l'onduleur triphasé. Le sous-module trip-Zone est utilisé pour une commutation sûre.
Mise en œuvre et résultats
Cet exemple d'application est testé avec le simulateur en temps réel HIL (OP4510 d'OPAL-RT Technologies) ainsi qu'avec le matériel d'électronique de puissance réel en utilisant le système de développement rapide d'électronique de puissance PELab-6PH.
Simulation HIL en temps réel (OP4510) #
L'alimentation, l'électronique de puissance et le réseau sont simulés à l'aide du simulateur en temps réel HIL OP4510 fourni par OPAL-RT Technologies.

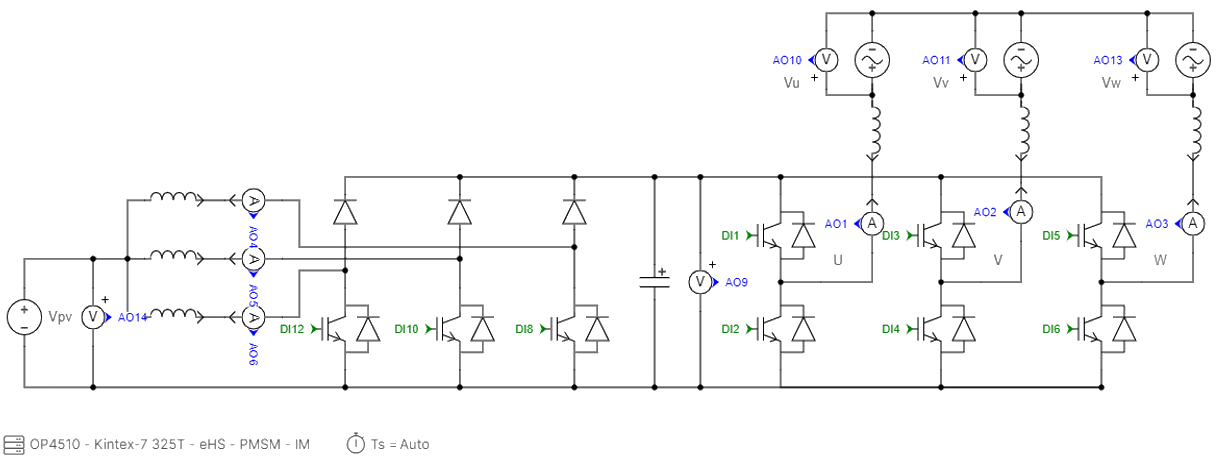
La simulation HIL est exécutée par RT-LAB en utilisant le solveur eHS basé sur le FPGA. Le circuit de puissance suivant est mis en œuvre à l'aide de l'éditeur de schémas OPAL-RT :
Résultats
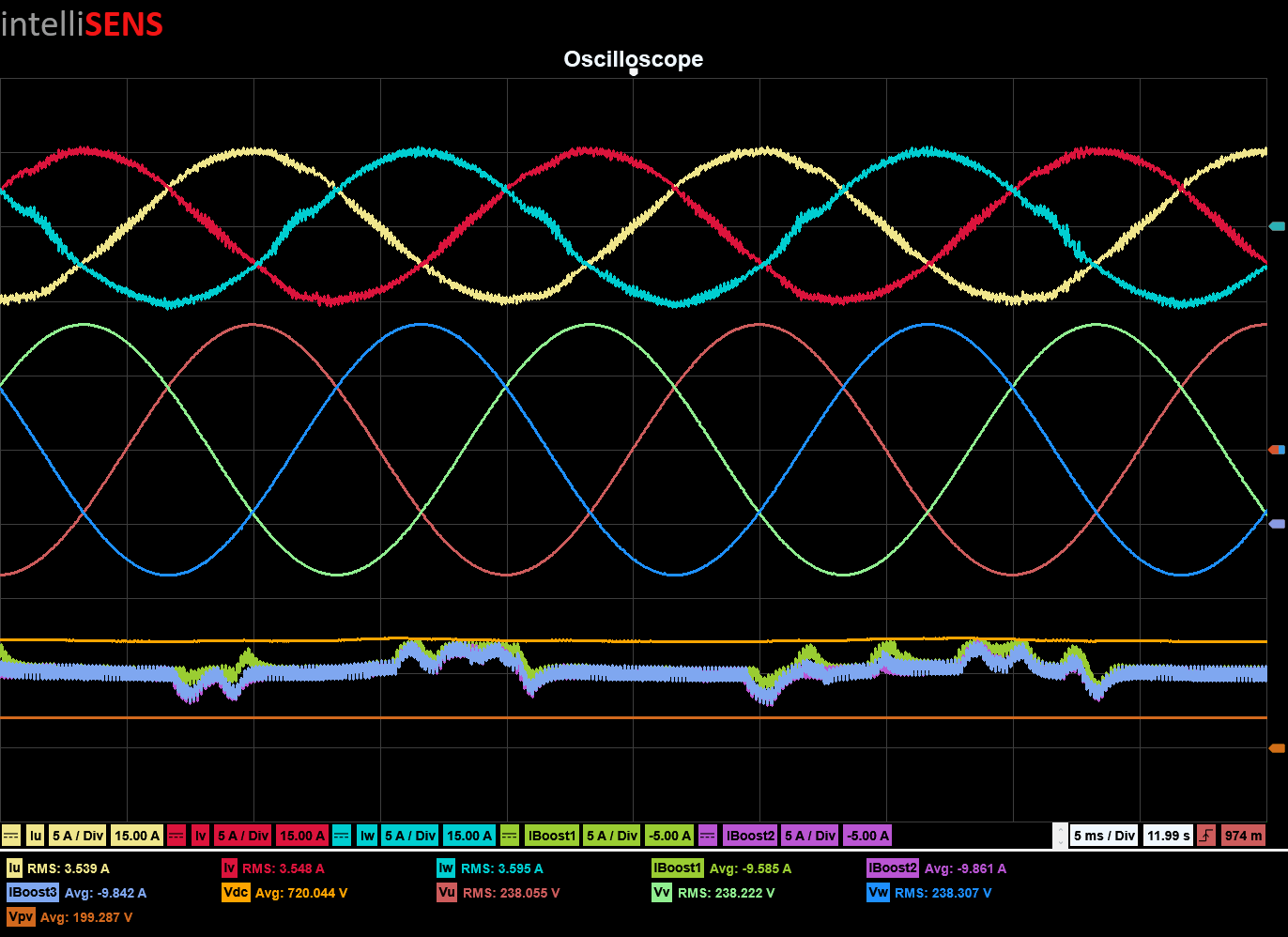
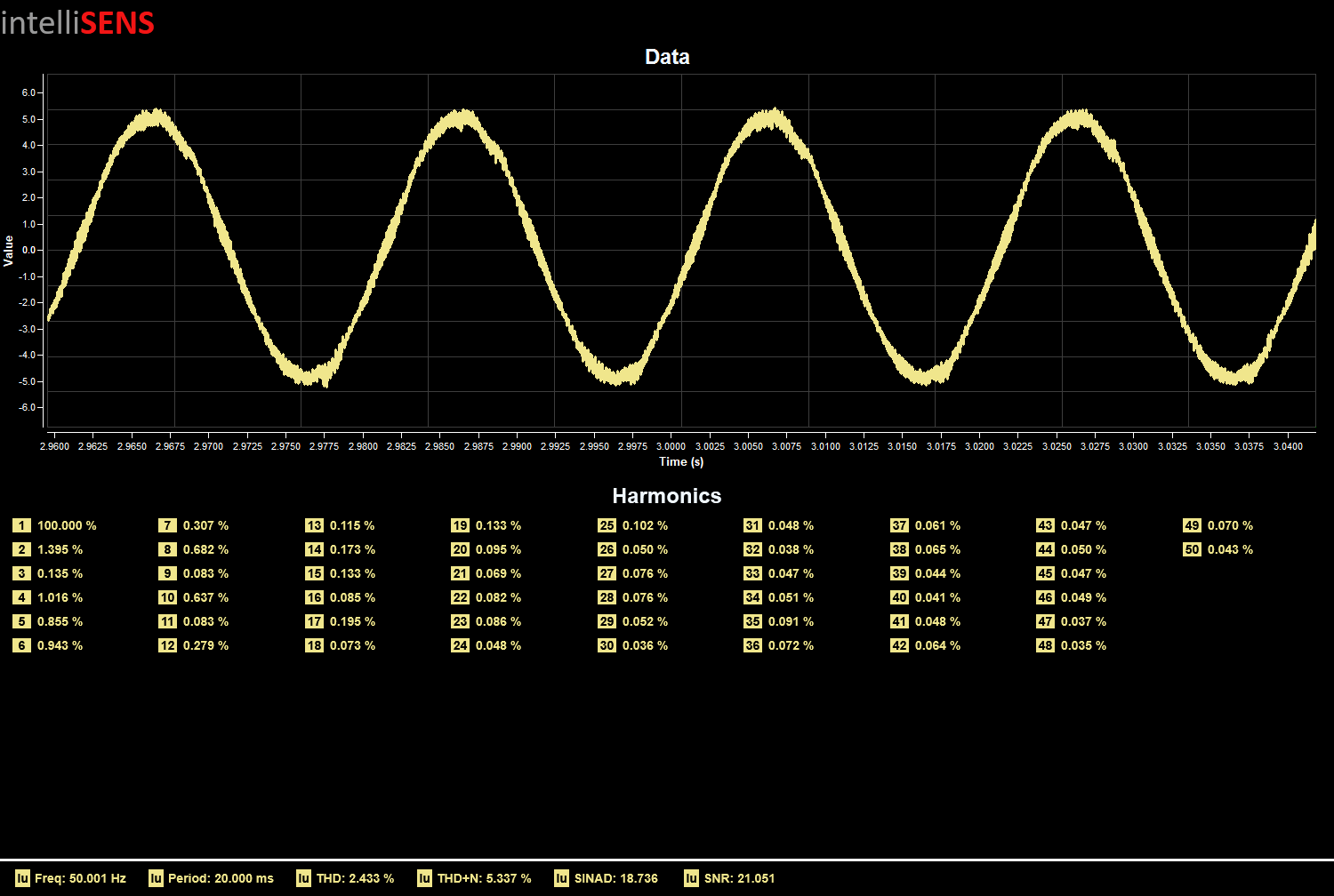
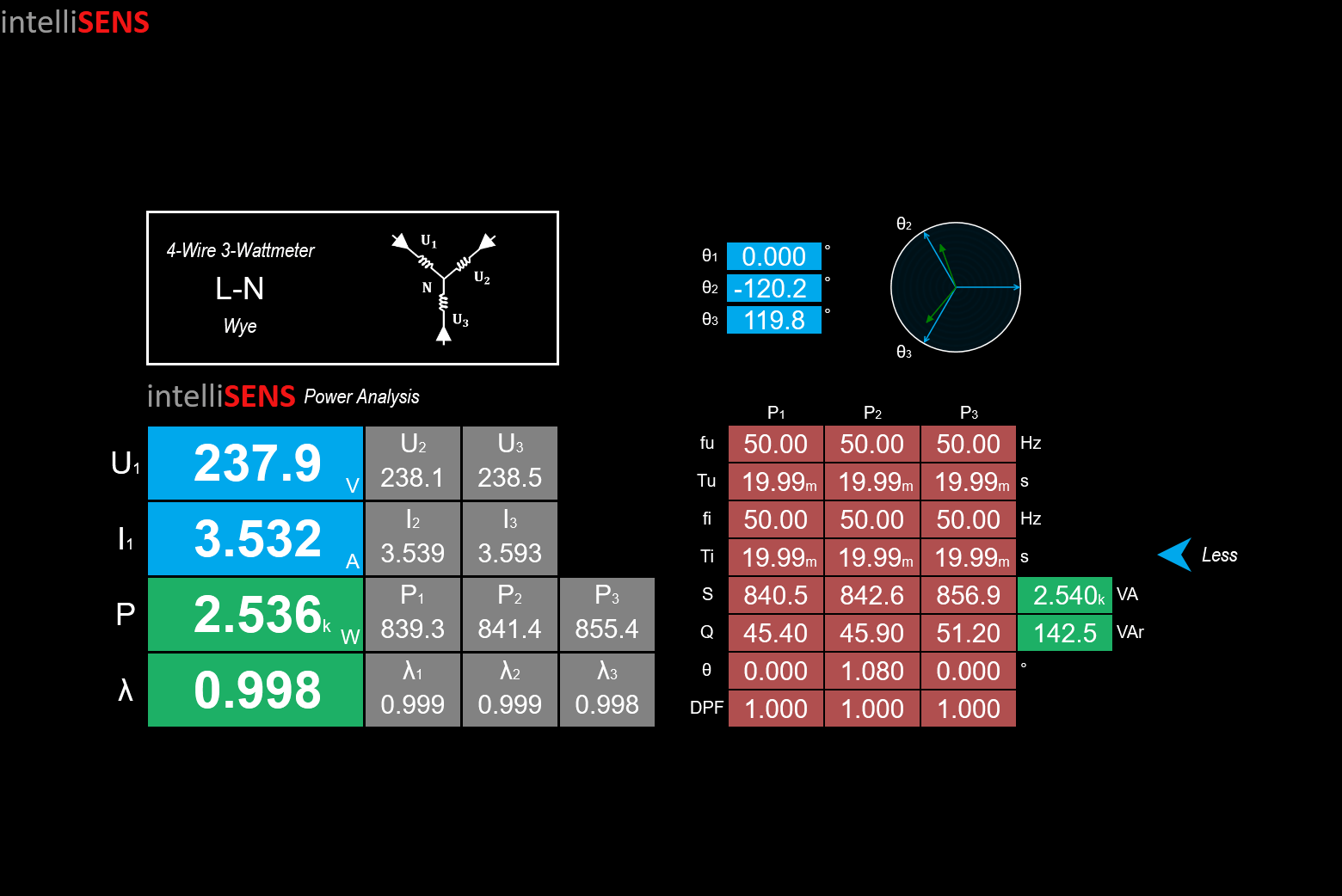
Les résultats de la mise en œuvre sont acquis à l'aide du contrôleur PEC qui fait partie du système PELab-6PH. Le PEController permet d'intégrer le logiciel de surveillance et d'enregistrement en temps réel intelliSENS. Ci-dessous figurent les résultats pour le point de référence de 5 A de crête (~3,5 A RMS). Le PELab fonctionne en mode RCP à HIL.
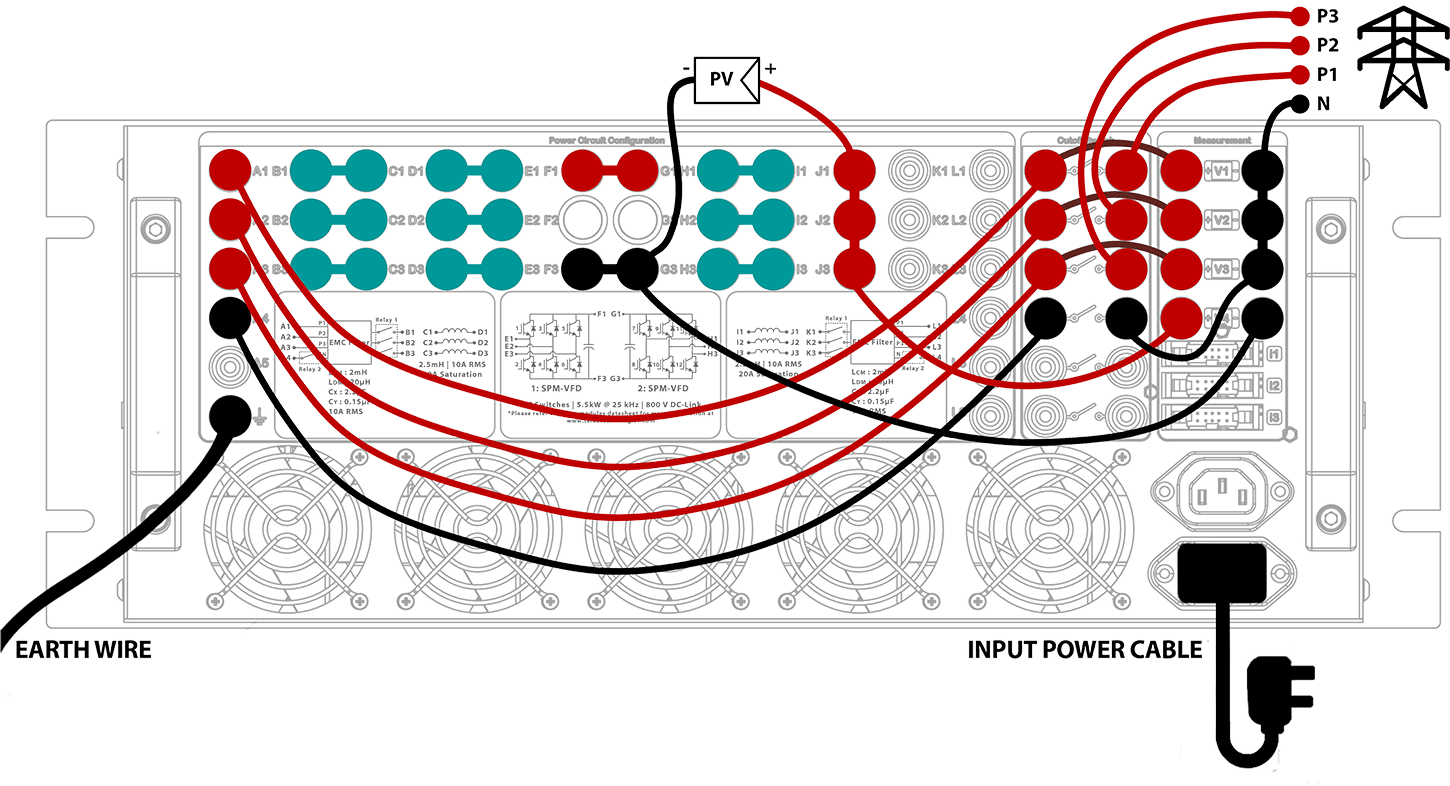
Implémentation matérielle en électronique de puissance (PELab-6PH) #
L'implémentation matérielle de l'étage de puissance est réalisée à l'aide du système PELab. La configuration PELab-6PH fournit deux onduleurs triphasés. Le premier onduleur est utilisé comme onduleur triphasé à 2 niveaux, tandis que le second onduleur est utilisé comme convertisseur élévateur parallèle. Des inducteurs, des filtres CEM et des relais sont également disponibles dans le PELab-6PH. La figure suivante montre le schéma de connexion du PELab-6PH :
ATTENTION ! LES PROCÉDURES SUIVANTES DOIVENT ÊTRE SUIVIES LORS DE LA MISE EN MARCHE ET DE L'ARRÊT DU SYSTÈME. LE NON-RESPECT DE CETTE PROCÉDURE PEUT ENTRAÎNER DES DOMMAGES PERMANENTS À L'ÉQUIPEMENT.
Procédure d'allumage #
- Assurez-vous que toutes les protections du système PELab sont activées et que le DC-Link est déchargé.
- Téléchargez le modèle Simulink sur la boîte PE-RCP à l'aide du bouton "monitor and tune".
- Assurez-vous que les contrôles du convertisseur élévateur et de l'onduleur sont désactivés dans le modèle.
- Mettez l'alimentation en courant continu sous tension.
- Activez le convertisseur boost à partir du modèle. Assurez-vous que la liaison CC est régulée à la tension souhaitée.
- Activez l'interrupteur de coupure pour vous connecter au réseau et attendez environ 2 secondes pour que la PLL se synchronise.
- Activez l'onduleur à partir du modèle Simulink.
- Une fois l'onduleur activé, il est possible de contrôler ses performances en modifiant le courant de référence pour l'injection.
Arrêt de la procédure #
- Désactiver l'onduleur du modèle Simulink.
- Fermer l'interrupteur de coupure pour déconnecter le réseau.
- Coupez l'alimentation en courant continu d'entrée et attendez que le DC-Link se décharge.
- Arrêtez le moniteur et réglez la session.
Résultats
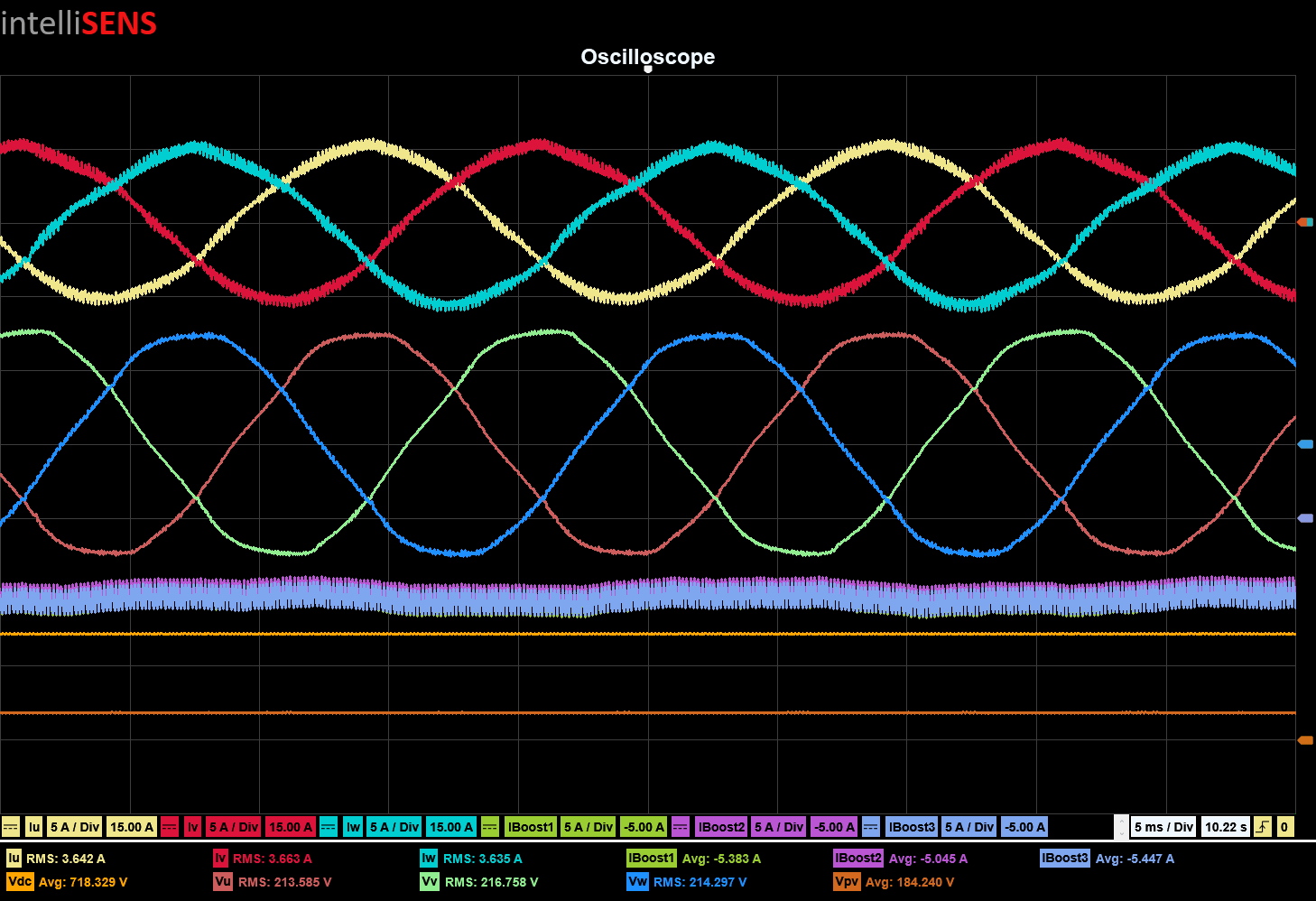
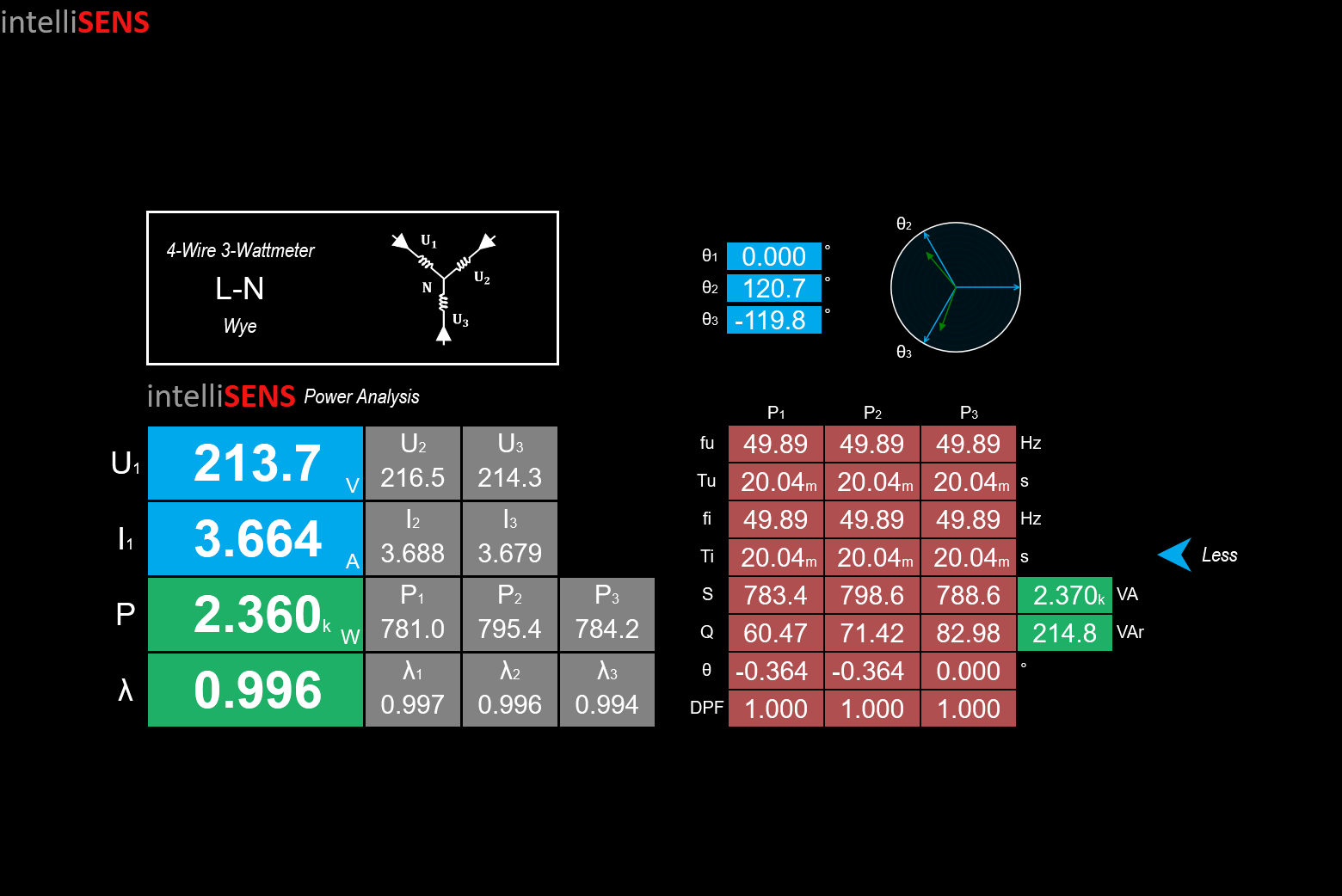
Les résultats de la mise en œuvre sont acquis à l'aide du contrôleur PEC qui fait partie du système PELab-6PH. Le PEController permet d'intégrer le logiciel de surveillance et d'enregistrement en temps réel intelliSENS. Ci-dessous figurent les résultats pour le point de référence de 5 A de crête (~3,5 A RMS). Le PELab fonctionne en mode RCP to Power.
Résumé des résultats
| Paramètres | Mise en œuvre de la HIL | Mise en œuvre de la puissance | Unité |
| Iu | 3.539 | 3.642 | A (RMS) |
| Iv | 3.548 | 3.663 | A (RMS) |
| Iw | 3.595 | 3.635 | A (RMS) |
| Iboost1 | 9.585 | 5.383 | A (AVG) |
| Iboost2 | 9.861 | 5.045 | A (AVG) |
| Iboost3 | 9.842 | 5.447 | A (AVG) |
| Vu | 238.055 | 213.585 | V (RMS) |
| Vv | 238.222 | 216.758 | V (RMS) |
| Vw | 238.307 | 214.297 | V (RMS) |
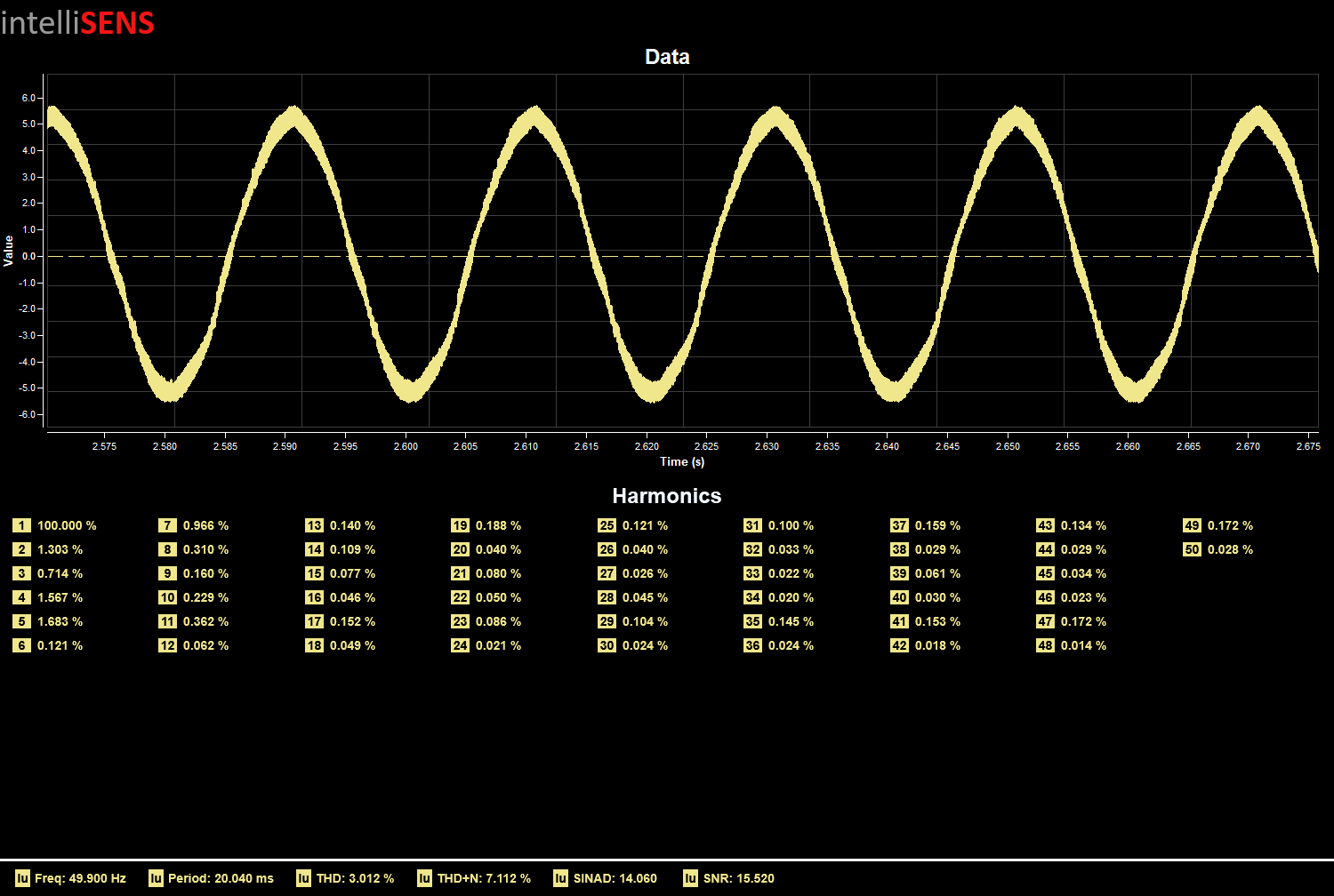
| Iu Courant THD | 2.433 | 3.012 | % |
| Iu Courant THD+N | 5.337 | 7.112 | % |
| Puissance de sortie | 2.536 | 2.36 | kW |
| Facteur de puissance | 0.998 | 0.996 | - |





