Introducción
Este ejemplo de aplicación demuestra la implementación de un inversor trifásico de conexión a red con convertidor boost en PEController utilizando STM32CubeIDE como entorno de desarrollo.
Herramientas necesarias
Asegúrese de preparar el entorno STM32CubeIDE siguiendo el procedimiento proporcionado en la Guía de inicio. Las siguientes herramientas son necesarias para entender e implementar este ejemplo de aplicación:
Visión general del hardware
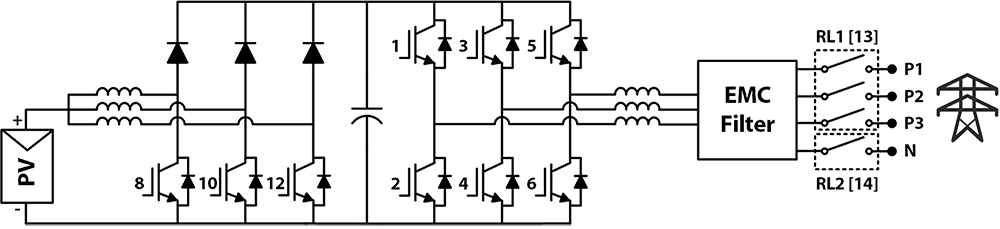
Este ejemplo utiliza un inversor de 2 niveles, un convertidor elevador (3 convertidores en paralelo) y un filtro CEM con relés de desconexión. A continuación se muestra un esquema simplificado del circuito del convertidor:
Control de la aplicación #
Requisitos
Para la verificación práctica de este ejemplo se necesitan los siguientes equipos/instalaciones:
- PELab-6PH con PEController
- Simulador en tiempo real HIL OP4510
- Fuente de alimentación de CC programable
- Suministro trifásico a la red
Condiciones de funcionamiento
En la tabla siguiente figuran las especificaciones de aplicación pertinentes:
| PARÁMETRO | VALOR |
| Frecuencia de conmutación PWM | 40 kHz |
| Tiempo muerto | 200 nSeg |
| Punto de ajuste de tensión de enlace CC | 720 VDC |
| Tensión de red | 380 VAC L-L |
| Frecuencia de red | 50 Hz |
| Tensión de entrada CC | 180 V - 200 V |
Algoritmo de control
Control del inversor
El inversor trifásico de conexión a red se controla mediante un control vectorial de corriente. La siguiente figura muestra el diagrama de control básico del algoritmo implementado:
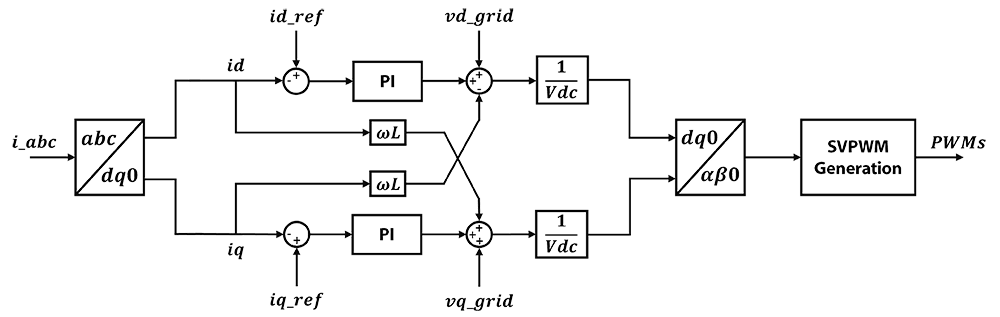
Las tensiones y corrientes de fase de red medidas se convierten al marco de referencia giratorio (DQ). El bucle de fase bloqueada (PLL) se utiliza para estimar el ángulo de fase de la red que se utiliza en la conversión. A continuación, se utiliza un controlador PI para compensar el error en las corrientes de fase. A continuación, se añade una compensación de desacoplamiento inductivo y una normalización a los ciclos de trabajo calculados. A continuación, se utiliza una técnica SVPWM para generar las señales de activación de los interruptores del inversor.
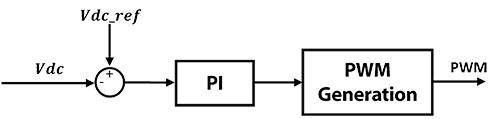
Control del convertidor Boost #
Se ha implementado un sencillo controlador PI para controlar el convertidor elevador y conseguir la tensión de CC deseada. Tenga en cuenta que este control es muy simple y requerirá protecciones de corriente adicionales basadas en hardware para evitar la saturación del inductor y la sobrecarga de corriente de la pata (disponibles en el sistema PELab-6PH). También es esencial aplicar un límite de ciclo de trabajo máximo para el PWM del convertidor elevador en función de la tensión de entrada para evitar cortocircuitos debidos a la saturación del inductor. Si se suministra al inversor una tensión de entrada superior a la consigna, el convertidor elevador no será necesario para el funcionamiento del inversor. En resumen, la tensión de DC-Link debe ser al menos 50 V superior a la tensión de red de pico para garantizar un flujo de corriente adecuado del inversor a la red.
Configuración del sistema de control
Las configuraciones para la aplicación grid-tie se pueden cambiar desde el archivo grid_tie_config.h en la sección UserFiles del proyecto CM7. A continuación se muestran las configuraciones disponibles:
| Parámetro | DESCRIPCIÓN |
| PWM_PERIOD_Us | Establece el periodo de tiempo PWM en microsegundos (Entero entre 1-250) |
| GRID_FREQ | Frecuencia de red estimada |
| L_OUT | Inductancia de salida en Henrios |
| BOOST_COUNT | El número de convertidores boost en paralelo. Las E/S boost pueden ajustarse desde el fichero main_controller.c. Si no estás seguro deja este valor a 3. Si no está seguro deje este valor a 3. Para enviar señales a las tres patas |
| BOOST_VSET | Tensión DC-Link requerida |
| KP_BOOST | Ganancia proporcional para el controlador PI de tensión DC-Link |
| KI_BOOST | Ganancia integral para el controlador PI de tensión DC-Link |
| KP_PLL | Ganancia proporcional para el controlador PI del PLL |
| KI_PLL | Ganancia integral para el controlador PI del PLL |
| KP_I | Ganancia proporcional para el controlador PI de corriente de fase |
| KI_I | Ganancia integral para el controlador PI de corriente de fase |
| BOOST_DUTYCYCLE_MAX | Límite máximo del ciclo de trabajo del PWM del convertidor boost |
| RELAY_TURN_ON_VBST | Relés ON tensión umbral |
| RELAY_TURN_OFF_VBST | Tensión umbral de desconexión del relé |
| INVERTER_DEADTIME_ns | Tiempo muerto del inversor en nanosegundos |
*La frecuencia de muestreo de las mediciones puede configurarse desde el archivo user_config. h de la sección Common del proyecto CM7/CM4.
Flujo de trabajo
El siguiente flujo de trabajo se implementa tal y como se describe brevemente a continuación:
1. Medidas analógicas #
El núcleo CM4 se utiliza para la medición de tensiones de red, corrientes de tramo y tensión DC-Link. El temporizador de medición se inicia en sincronización con los temporizadores PWM. Esto asegura que en caso de que la frecuencia de medición y PWM sea la misma, la medición siempre se producirá al inicio de cada ciclo PWM.
2. Sistema de control
El sistema de control tiene un bloque de estimación del ciclo de trabajo que se utiliza para calcular los valores de ciclo de trabajo necesarios para el inversor y el convertidor elevador. El sistema de control contiene las siguientes secciones:
A. Bucle de fase bloqueada (PLL) #
El bloque PLL se utiliza para sincronizar el control con el ángulo de fase de la red. El ángulo de fase adquirido se utiliza para las transformaciones Park/Clarke, así como para la sincronización de las tensiones de fase de la red y las corrientes de fase inyectadas.
B. Transformaciones
Implementa transformaciones para convertir entre marcos estacionarios (ABC y αβ) y marcos giratorios (DQ).
C. Control actual
Se aplica un control de corriente basado en PI a las corrientes DQ obtenidas tras la transformación. Se aplica una compensación de desacoplamiento inductivo para un control robusto de la corriente.
D. Control del convertidor Boost #
Implementa un controlador PI para generar el ciclo de trabajo del convertidor elevador
E. Generación SVPWM #
Implementa la modulación por ancho de pulsos vectorial espacial (SVPWM) que proporciona mayor tensión, alta reducción de los armónicos dominantes y menor distorsión armónica total para un inversor trifásico.
F. Activar/desactivar control #
El control de activación/desactivación se implementa en lo siguiente:
Relés: Los relés sólo se encienden después de asegurarse de que el DC-Link está cargado para evitar la corriente de irrupción de la red que puede dañar los módulos de potencia. Tenga en cuenta que esto es absolutamente esencial, ya que cuando el DC-Link no está cargado, los diodos del cuerpo de los interruptores del inversor actúan como un rectificador incontrolado y, por lo tanto, puede fluir una corriente de cortocircuito inevitable hacia el inversor y dañar los interruptores de forma permanente.
Inversor Trifásico: Se habilita sólo si se cumplen las siguientes condiciones:
- El DC-Link está precargado y tiene una tensión superior a la de la red.
- La magnitud de la tensión de red medida se encuentra en el rango especificado.
- La estimación de la fase de rejilla debe estar dentro de un margen de error válido.
3. Generación de salida #
Los controladores PWM en el PEControllerBSP se utilizan para generar las señales PWM para los convertidores boost y el inversor trifásico. La función de activación del inversor se utiliza para activar/desactivar el inversor al cambiar entre los estados válido e inválido.
Aplicación y resultados
Este ejemplo de aplicación se prueba con el simulador en tiempo real HIL (OP4510 de OPAL-RT Technologies), así como con hardware de electrónica de potencia real utilizando el sistema de desarrollo rápido de electrónica de potencia PELab-6PH.
Simulación HIL en tiempo real (OP4510) #
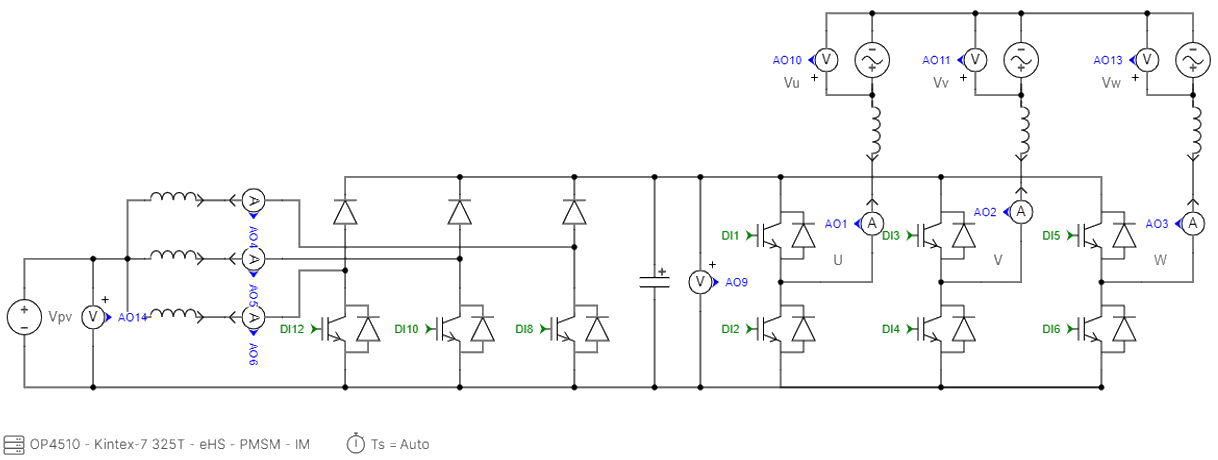
La fuente de alimentación, la electrónica de potencia y la red se simulan utilizando el simulador en tiempo real OP4510 HIL proporcionado por OPAL-RT Technologies.

La simulación HIL se ejecuta mediante RT-LAB utilizando el solucionador basado en FPGA eHS. El siguiente circuito de potencia se implementa utilizando el editor de esquemas OPAL-RT:
Resultados
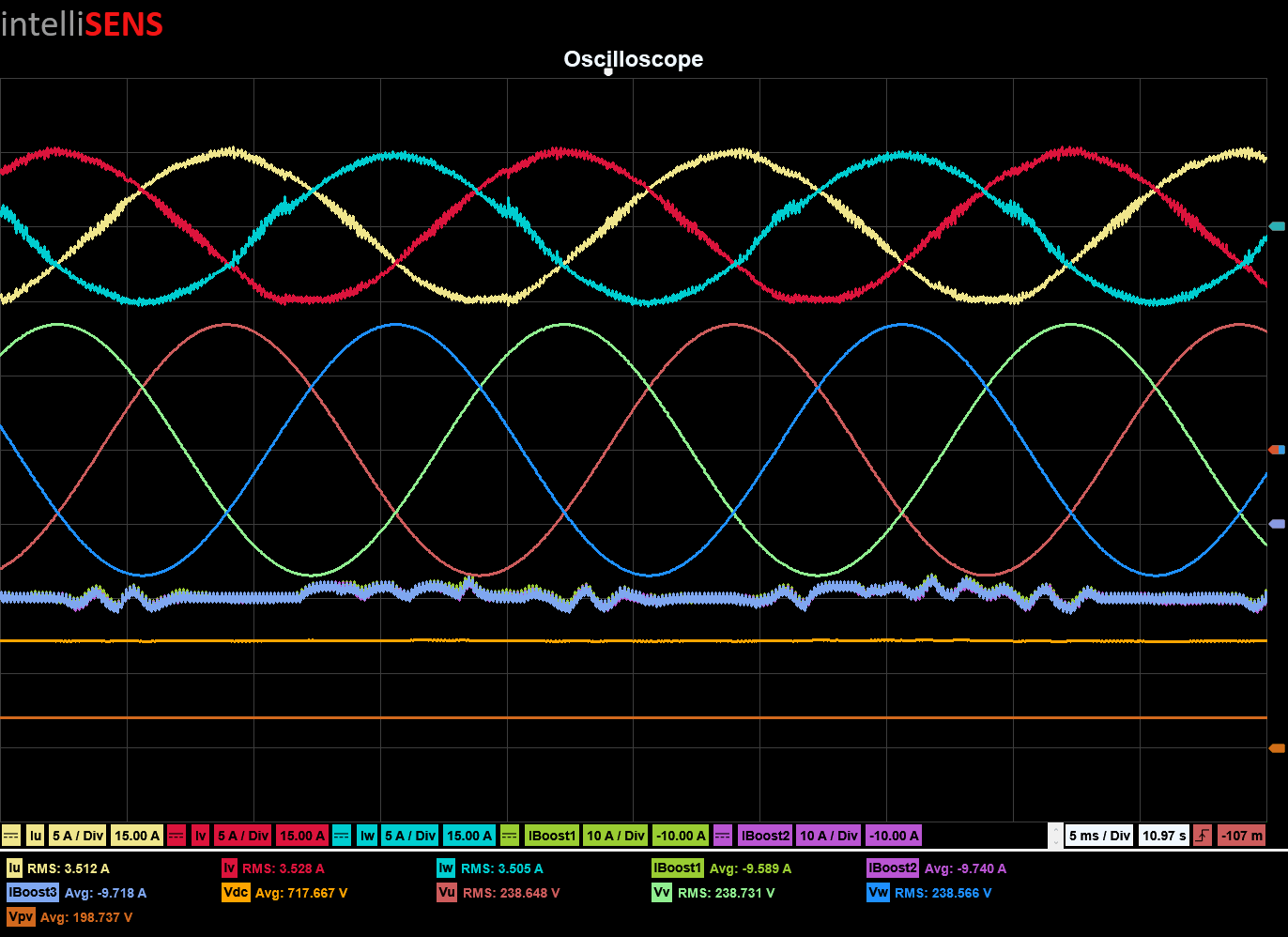
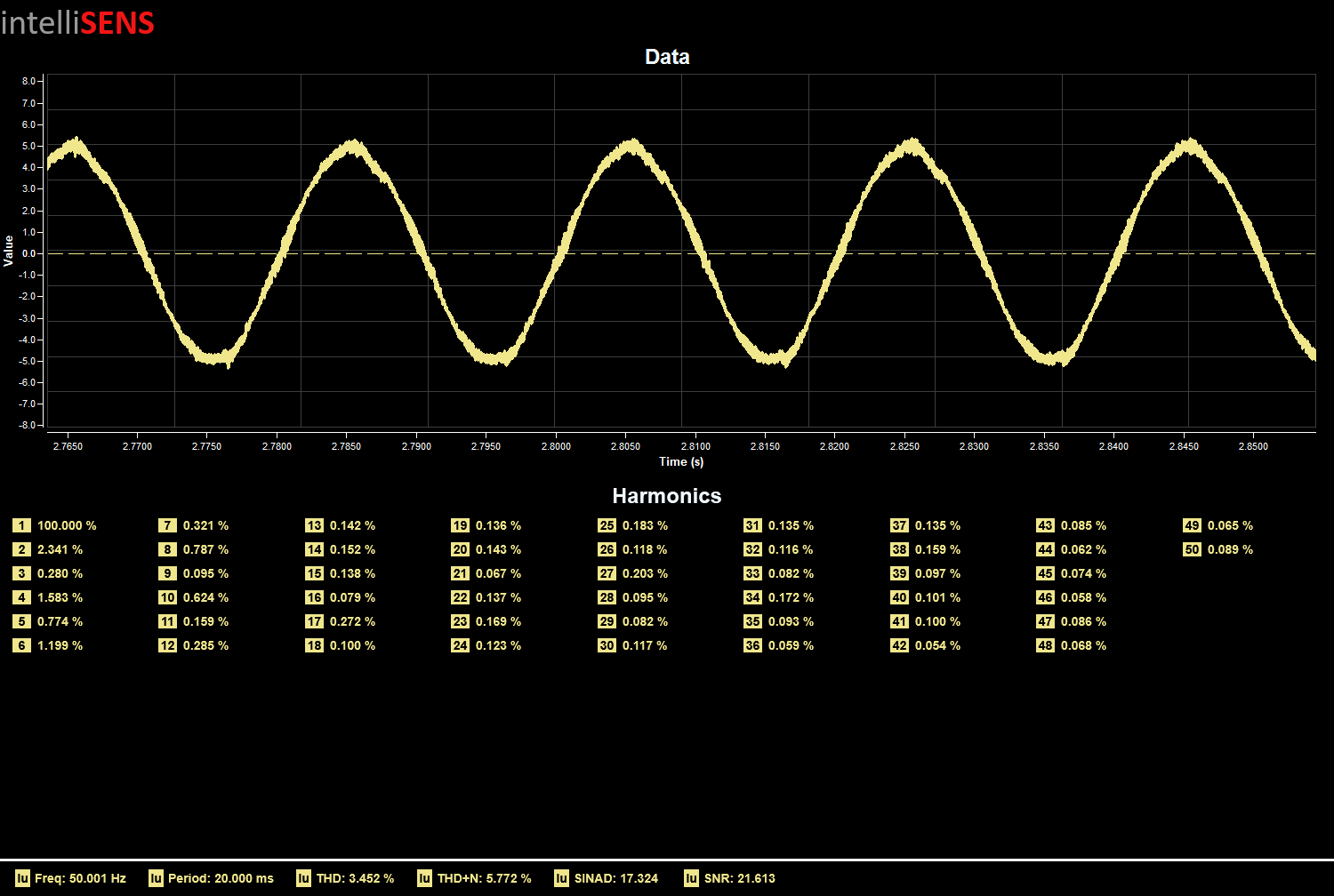
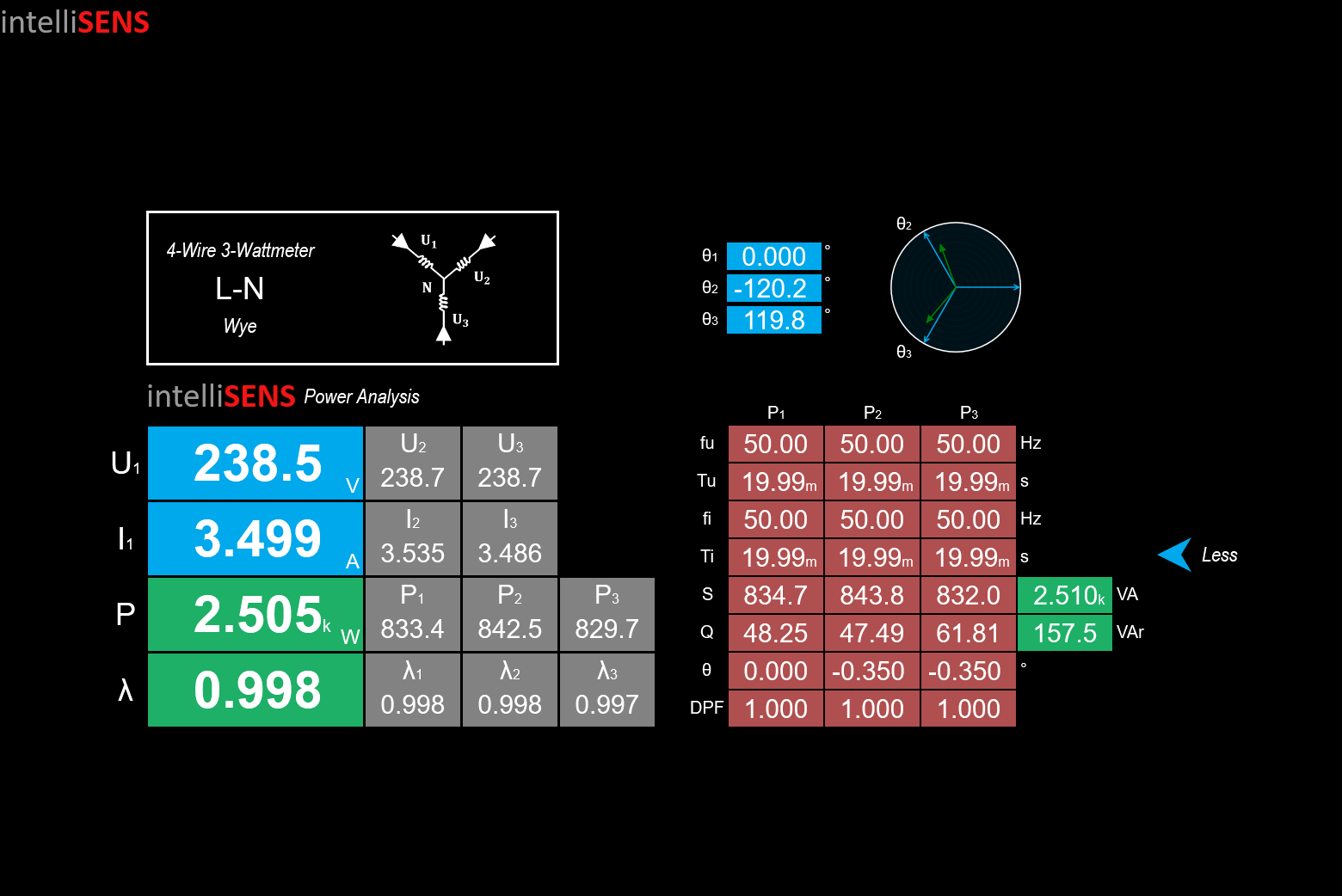
Los resultados de la aplicación se adquieren utilizando el propio PEController en el sistema PELab-6PH. El PEController proporciona integración con el software de monitorización y registro en tiempo real intelliSENS. A continuación se muestran los resultados para el punto de referencia de 5 A de pico (~3,5 A RMS). El PELab está funcionando en modo UC a HIL.
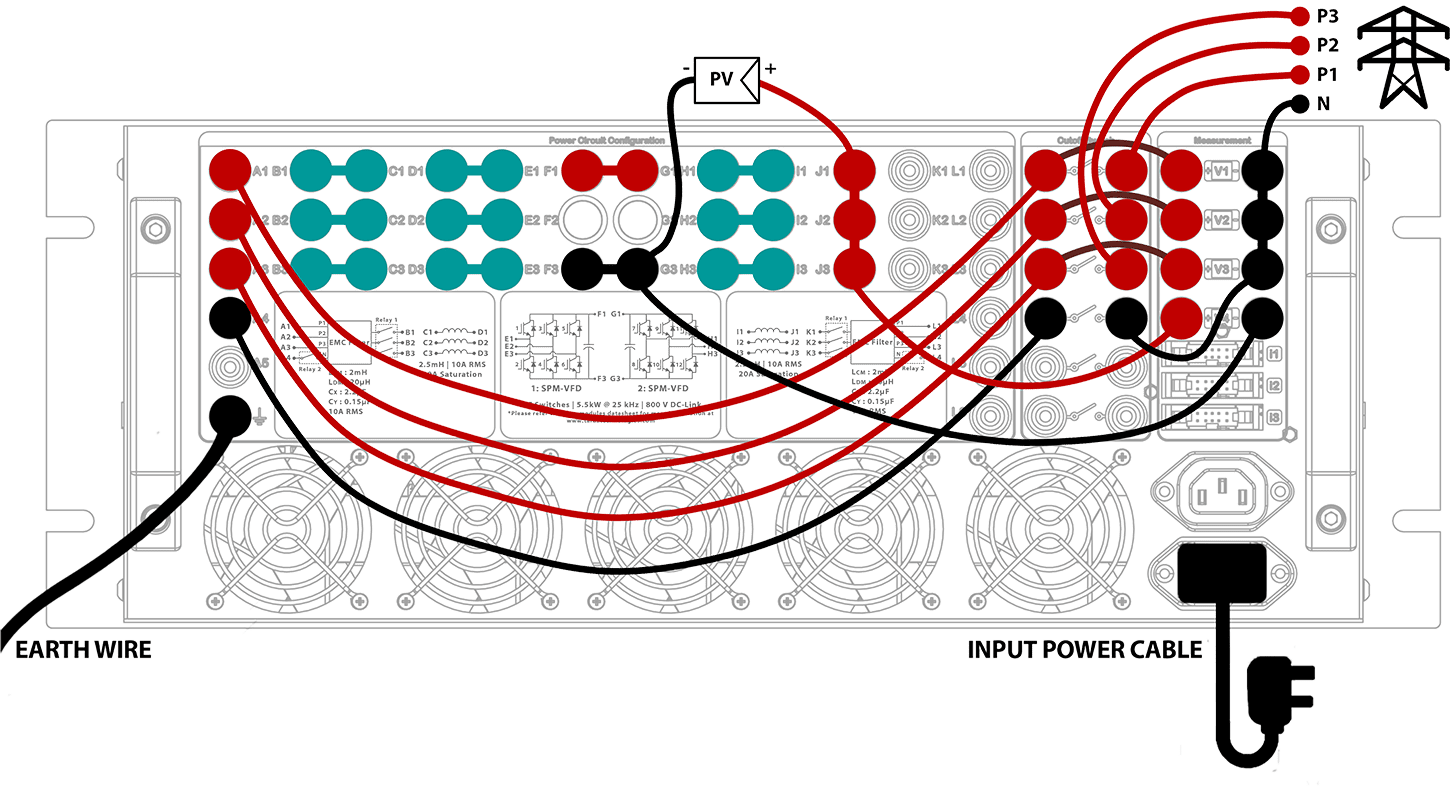
Implementación de hardware de electrónica de potencia (PELab-6PH) #
La implementación hardware de la etapa de potencia se realiza utilizando el sistema PELab. La configuración PELab-6PH proporciona dos inversores trifásicos. El primer inversor se utiliza como inversor trifásico de 2 niveles, mientras que el segundo inversor se utiliza como convertidor elevador paralelo. El PELab-6PH también dispone de inductancias, filtros EMC y relés. La siguiente figura muestra el diagrama de conexiones del PELab-6PH:
ADVERTENCIA SE DEBEN SEGUIR LOS SIGUIENTES PROCEDIMIENTOS AL ENCENDER Y APAGAR EL SISTEMA. SU INCUMPLIMIENTO PUEDE PROVOCAR DAÑOS PERMANENTES EN EL EQUIPO.
Procedimiento de encendido #
- Asegúrese de que todas las protecciones del sistema PELab están activadas y que el DC-Link está descargado.
- Programa el PEController con el código de ejemplo.
- Encienda la fuente de alimentación de CC de entrada.
- Asegúrese de que el DC-Link está siendo regulado a la tensión deseada.
- Enciende el interruptor de corte para conectarte a la red.
- El inversor se activará automáticamente una vez sincronizada la red.
Apagar procedimiento #
- Apague el interruptor de corte para desconectar la red.
- Desconecte la fuente de alimentación de CC de entrada y espere a que se descargue el DC-Link.
Resultados
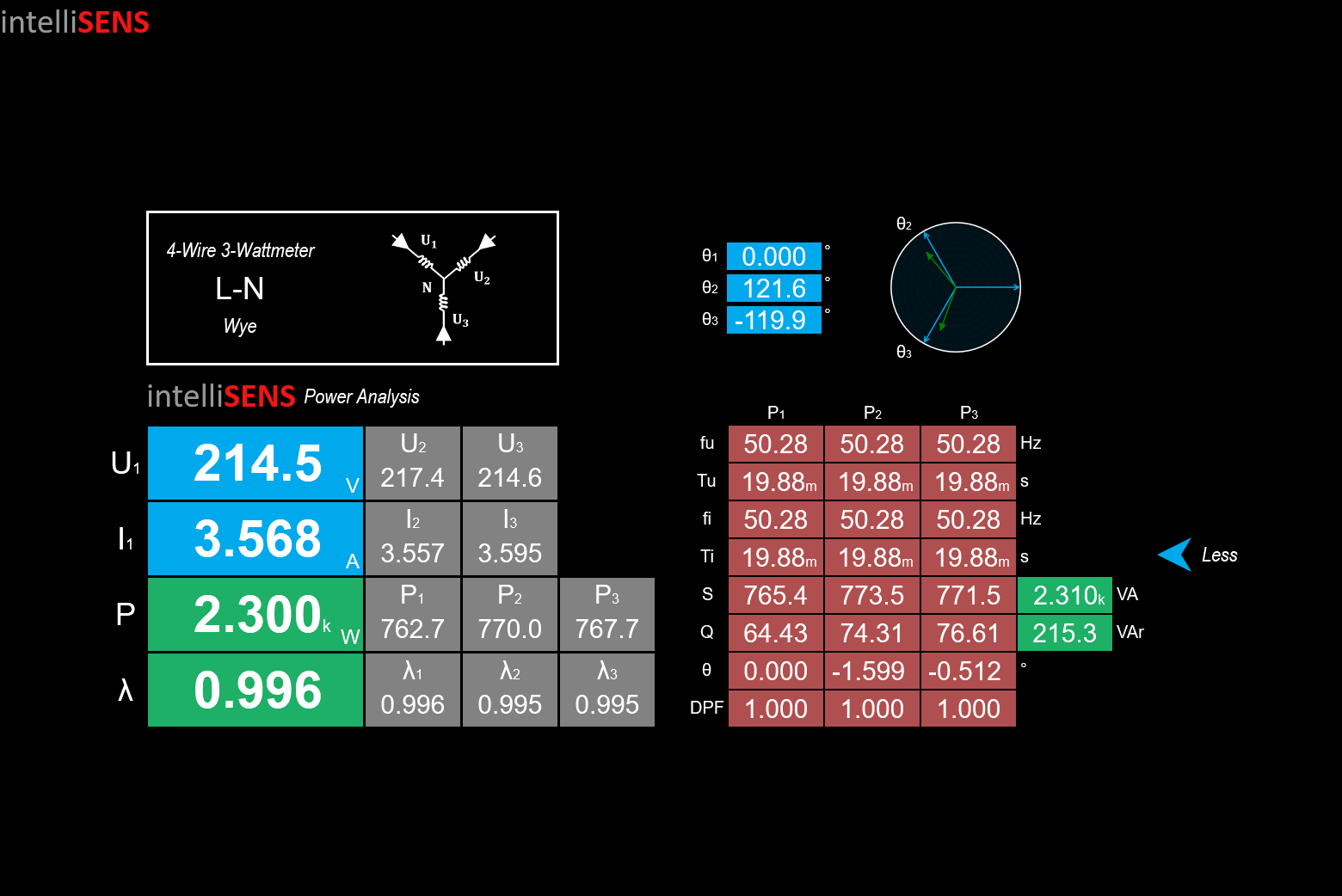
Los resultados de la aplicación se adquieren utilizando el propio PEController en el sistema PELab-6PH. El PEController proporciona integración con el software de monitorización y registro en tiempo real intelliSENS. A continuación se muestran los resultados para el punto de referencia de 5 A de pico (~3,5 A RMS). El PELab está funcionando en modo UC to Power.
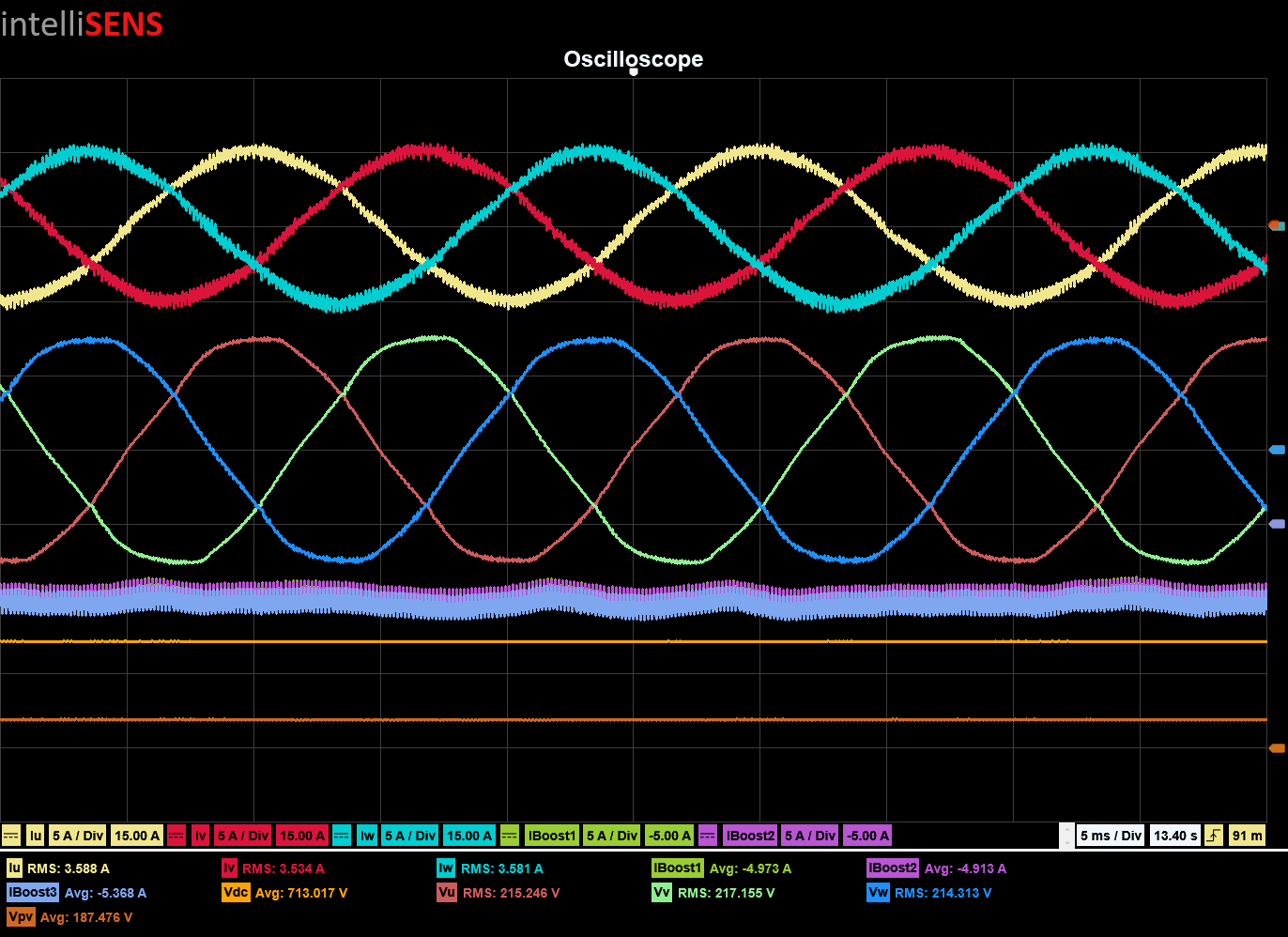
Resumen de resultados
| Parámetro | Implantación del HIL | Aplicación de la potencia | Unidad |
| Iu | 3.512 | 3.588 | A (RMS) |
| Iv | 3.528 | 3.534 | A (RMS) |
| Iw | 3.505 | 3.581 | A (RMS) |
| Iboost1 | 9.589 | 4.973 | A (AVG) |
| Iboost2 | 9.740 | 4.913 | A (AVG) |
| Iboost3 | 9.718 | 5.368 | A (AVG) |
| Vu | 238.648 | 215.246 | V (RMS) |
| Vv | 238.731 | 217.155 | V (RMS) |
| Vw | 238.566 | 214.313 | V (RMS) |
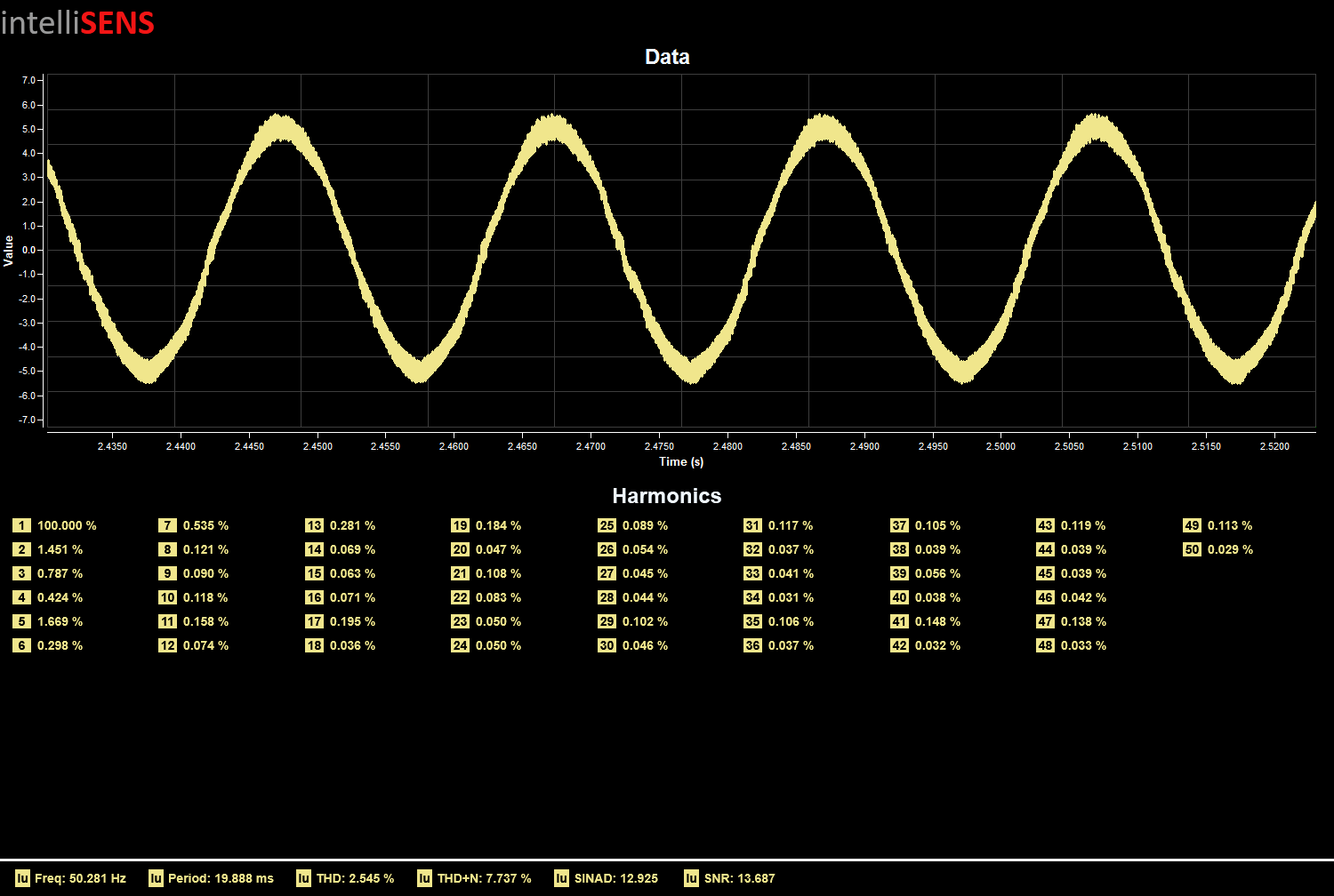
| Iu Corriente THD | 3.452 | 2.545 | % |
| Iu Corriente THD+N | 5.772 | 7.737 | % |
| Potencia de salida | 2.505 | 2.30 | kW |
| Factor de potencia | 0.998 | 0.996 | - |





