はじめに#
PE-RCP Box は、TI C2000 F28379D マイコンをベースとしたラピッドコントロールプロトタイピングソリューションで、MATLAB/Simulink および PSIM でのブロックベースのプログラミングをサポートするように特別に設計されており、パワーエレクトロニクスシステムの制御アルゴリズムの開発に不可欠です。このガイドでは、PE-RCP Box上でMATLAB/Simulinkプログラミングを開始する方法について説明します。
*注:この文書はPE-RCPにも適用されます。
前提条件
以下のツールは、この記事で示された例を理解し実装するための前提条件である:
- PE-RCPボックス
- MATLAB R2019b またはそれ以降
- コード・コンポーザー・スタジオ バージョン11
ハードウェアの概要
PE-RCPボックスは、パワーエレクトロニクスハードウェアやHIL(Hardware in Loop)システムに制御アルゴリズムを実装するために使用できます。また、ファイバー、CAN、USB、DB-50/DB-37メスコネクタなど、さまざまなリンク/ポートを通じて診断や故障報告が可能です。

以下の手順に従って、PE-RCP Box でデモアプリケーションを実行できるように準備してください:
- PE-RCP ボックスに 15V アダプタで電源を入れます。
- ICP USBをType-A USBケーブルでコンピュータに接続する。
- フロントパネルのON/OFFボタンを押す。
MATLAB#用C2000サポートパッケージ
MATLAB 用 Texas Instruments C2000 Processors 用 Embedded Coder Support Package をインストールします。先に進む前に、必ずインターネットに接続してください。
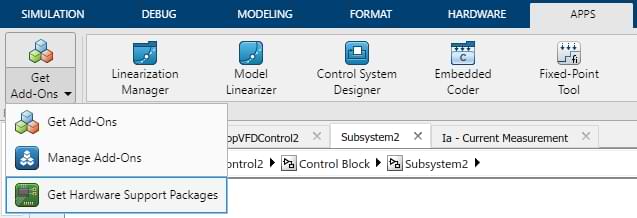
ステップ 1:「アプリ」タブで「ハードウェアサポートパッケージを入手」をクリックします:
ステップ 2:"Embedded Coder Support Package for Texas Instruments C2000 Processors "を選択し、インストールを押します:

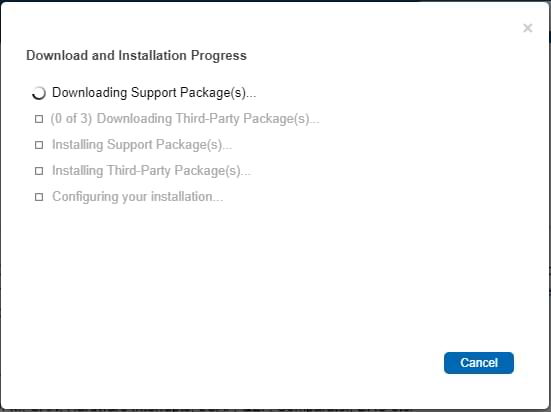
ステップ 3:インストールが開始されると、以下のウィンドウにインストール状況が表示されます:
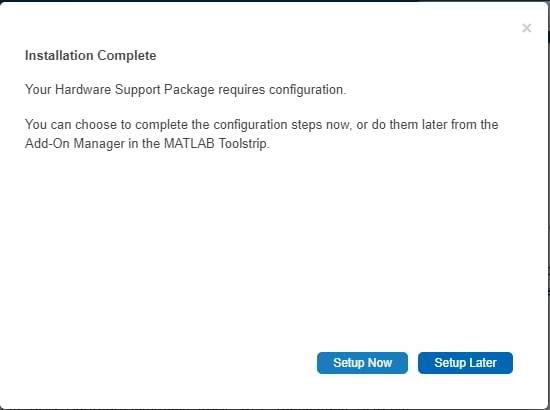
ステップ 4:インストールが完了したら、「今すぐセットアップ」をクリックします:
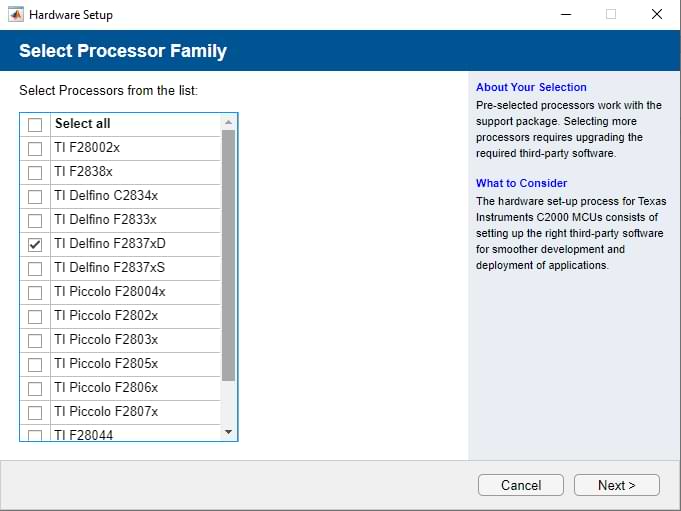
ステップ 5: Processor familyでTI Delfino F2837xDを選択し、"Next "をクリックする:
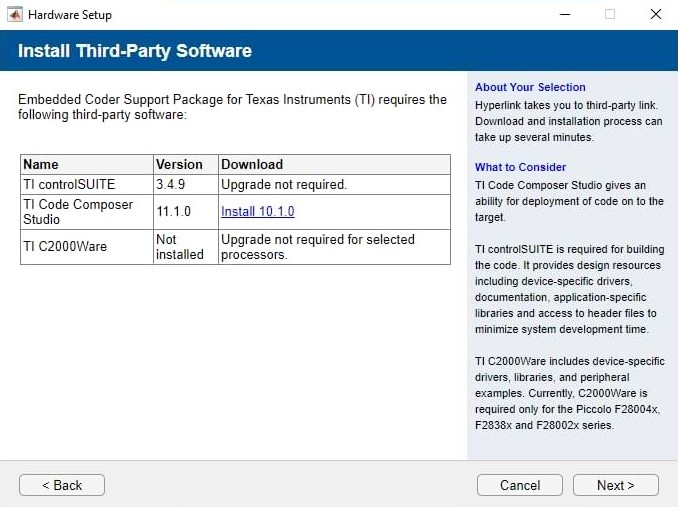
ステップ6:必要なサードパーティーソフトウェアをインストールし、"Next "をクリックします:
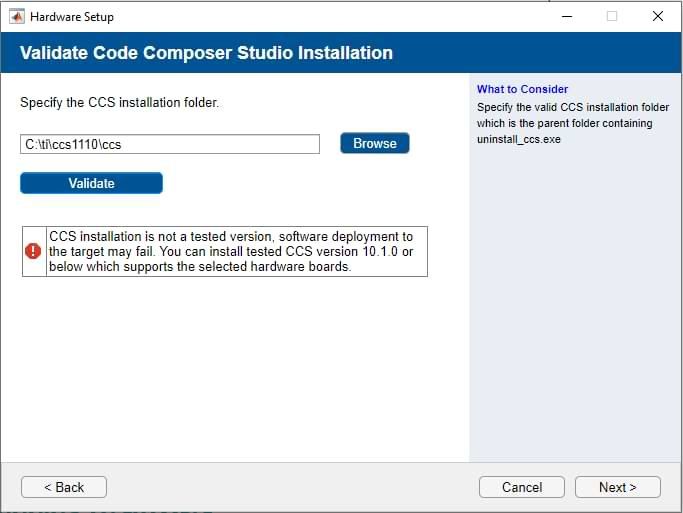
ステップ7:CCSインストール・フォルダーについて、"Validate "をクリックし(警告は無視)、"Next "をクリックする:
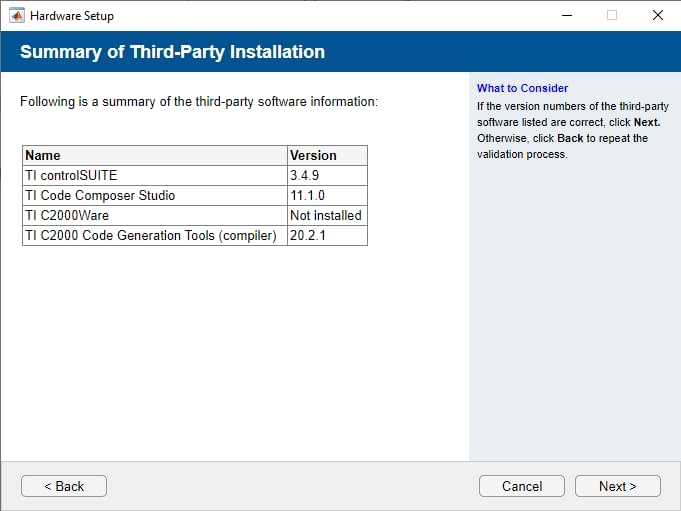
ステップ 8:インストールの概要を確認し、「Next」をクリックしてセットアップを終了します:
V/f制御の実行例#.
このドキュメントでは、PE-RCPBox での使用例として「PE-RCP V/f Control Example」を使用します。先に進む前に、すべての前提ツールをインストールしてください。
ステップ1:添付のサンプルをダウンロードして開く。
ステップ2:ハードウェア設定が以下のようになっていることを確認する:

ステップ 3: ビルド、デプロイ、開始をクリックします。PE-RCP Box にアルゴリズムがアップロードされます:

実施番号
本節では、3相誘導電動機におけるV/f制御の実用的な実装について説明する。
必要な機材
V/f コントローラの機能を実際に検証するには、以下の装置が必要です。
- PEラボ(PLB-6PH)
- 三相負荷(誘導電動機/誘導機)
- DC電源
実施内容
PE-RCP Box では、この例の実装に外部パワーステージと 3 相負荷が必要です。本ガイドでは、PE-Lab(PLB-6PH)で三相誘導電動機を負荷としてVFD制御を行った結果について説明します。
この例は、以下の概念を示している:
- V/f制御は三相誘導電動機の速度制御アルゴリズムで、V/f比が常に一定であることを意味する。周波数が低下すれば出力電圧は低下し、その逆も同様です。
- DC-Link電圧は出力電圧に影響しません。その代わり、出力電圧を一定に保つために変調指数を調整します。
この例では、周波数の変更は常に指定された加速係数で実行され、非常に高い瞬時電流の要求を防ぐ。
この例では、以下の TI C2000 ブロックを使用して実装します:
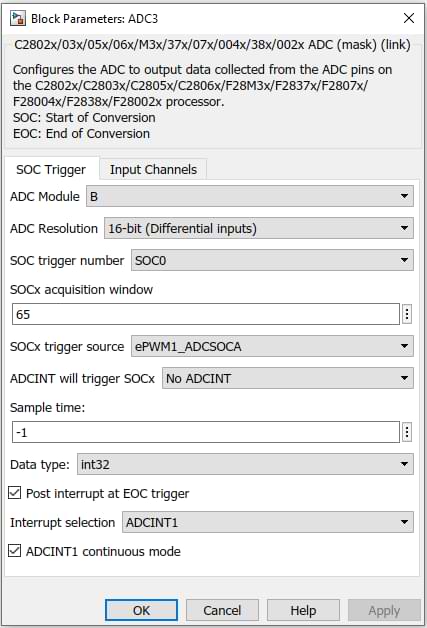
ADCブロック
個々の ADC ブロックは、1 つのアナログ・チャンネルのアナログからデジ タルへの変換を制御します。このブロックは、必要なアナログ・チャンネルに関連するモジュール、分解能、トリガー信号を選択するためのパラメータを提供します。必要であれば、ADC 割り込みもチャンネルに対して有効にすることができます。
この例では 16 ビット ADC が DC リンク電圧と相電流の測定値を読み出します。両方の変換は ePWM1 ブロックからトリガされ、DC リンク電圧測定の変換終了は割り込み信号を発生します。
詳しくは、本書第11章https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf。
ハードウェア割り込み
F28379Dマイクロコントローラは、異なるイベントに対して動作をトリガするためのハードウェア割り込みを持っています。割り込みの選択は、PIEベクタテーブルに基づいて行われます。PIEベクタテーブルの詳細は、以下のリンクからご覧いただけます:
https://www.mathworks.com/help/supportpkg/texasinstrumentsc2000/ref/c28xhardwareinterrupt.html
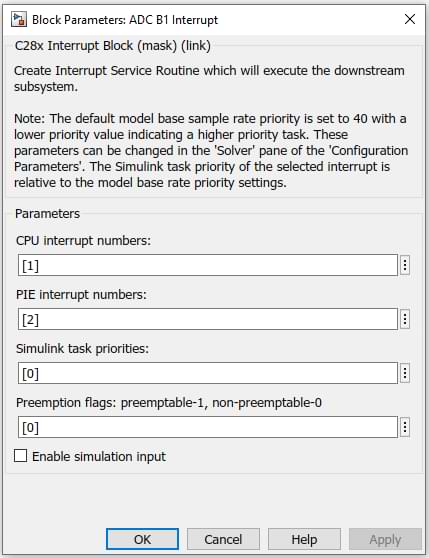
この例では、割り込みブロックが制御アルゴリズムをトリガするため、次の PWM サイクルのデューティ・サイクルが計算されます。この例では、DC-Link 電圧測定時の変換完了割り込みを使用しています。
ePWMブロック
ePWM ブロックは PWM 信号を制御する。各ブロックにはePWMAとePWMBの2つのPWM信号が含まれます。イベント・トリガー・セクションは、ePWMハードウェア割り込みと他のモジュールとの同期に使用できます。デッドバンドユニットは、PWMペア間のデッドタイムを制御します。
この例では、ePWM ブロックは PWM 信号を生成し、変換開始(SOC)信号を ADC モジュールに送ります。

詳細については、本書の第15章(https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf)を参照のこと。
仕様
以下の表は、関連する実装仕様である:
| パラメータ | 価値 |
| PWM周波数 | 10 KHz |
| 必要出力周波数 | 15 Hz - 25 Hz |
| DCリンク電圧 | 300V - 600V |
| 三相モーター定格 | 380VL-L /50Hz |
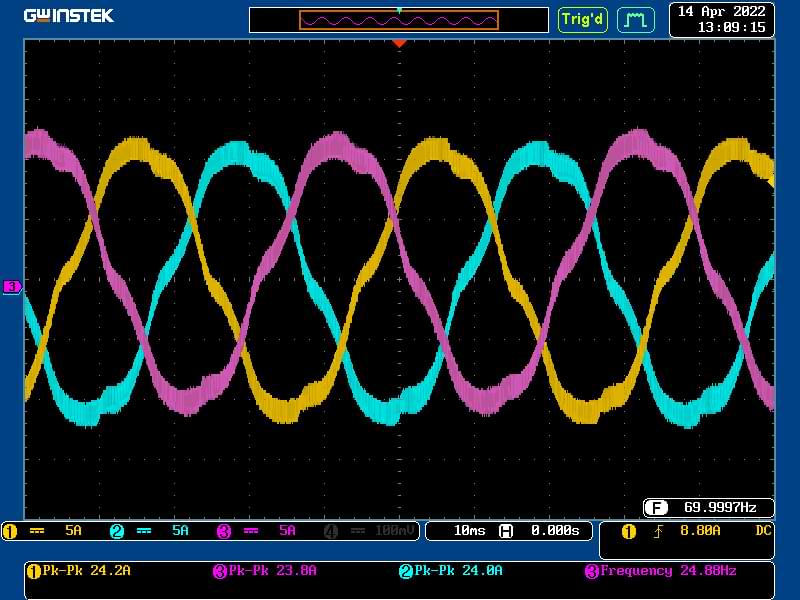
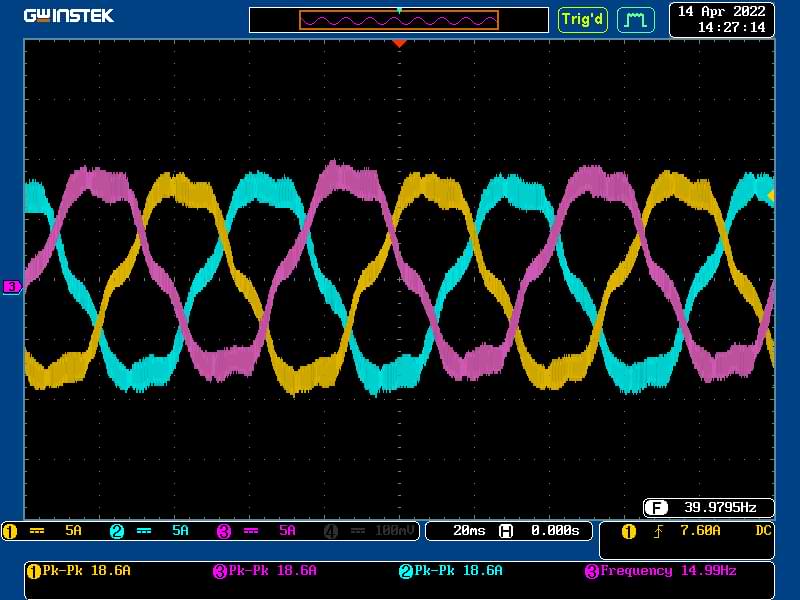
結果
このセクションでは、上記のモデルで設定可能な異なる要求周波数における3相の出力電流波形を提供します。関連する測定値も画像でご覧いただけます。
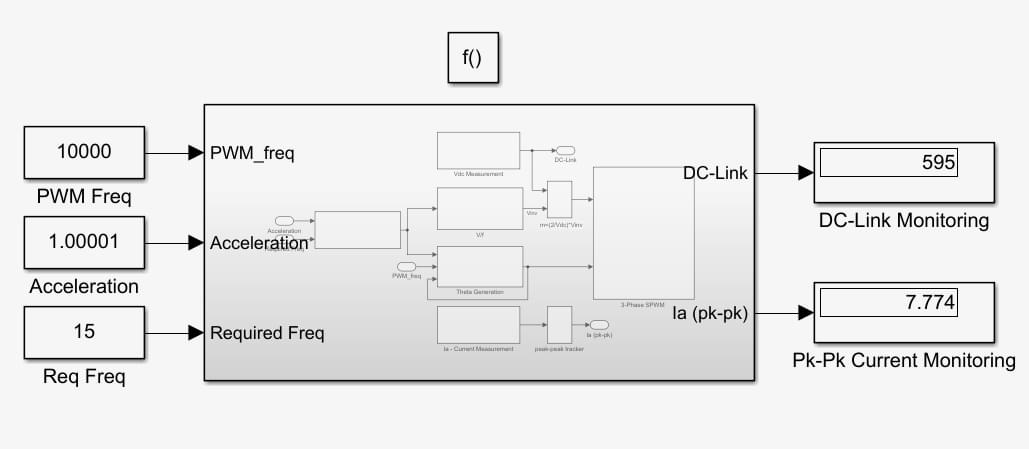
モニター&チューニング#1
ホストマシンとターゲットボードが接続されると、MATLAB/Simulink のディスプレイを使用して結果をモニタし、デバッグすることができます。Tune and Monitor は、hardware タブの緑色のアイコンをクリックします。

- DCリンク電圧とピーク-ピーク脚電流(Ia)のアナログ測定は、表示ブロックを使用してSimulinkでモニターされます。
- 必要周波数、PWM周波数、加速度は、定数ブロックを使用してリアルタイムで変化させることができます。