Introduction
PE-RCP Box est une solution de prototypage rapide de contrôle basée sur le microcontrôleur TI C2000 F28379D, spécialement conçue pour prendre en charge la programmation par blocs dans MATLAB/Simulink et PSIM, ce qui en fait un outil essentiel pour le développement d'algorithmes de contrôle pour les systèmes électroniques de puissance. Ce guide décrit comment démarrer la programmation MATLAB/Simulink sur la PE-RCP Box.
*Note : Ce document s'applique également au PE-RCP.
Pré-requis #
Les outils suivants sont indispensables pour comprendre et mettre en œuvre l'exemple donné dans cet article :
- Boîte PE-RCP
- MATLAB R2019b ou plus récent
- Code Composer Studio Version 11
Vue d'ensemble du matériel #
Le boîtier PE-RCP peut être utilisé pour mettre en œuvre des algorithmes de contrôle sur des logiciels d'électronique de puissance ainsi que sur des systèmes Hardware in Loop (HIL). Il permet également d'effectuer des diagnostics et de signaler des erreurs par le biais de différents liens/ports disponibles tels que la fibre, le CAN, l'USB et les connecteurs femelles DB-50/ DB-37.

Suivez les étapes suivantes pour préparer la boîte PE-RCP à l'exécution de l'application de démonstration :
- Alimenter le boîtier PE-RCP à l'aide de l'adaptateur 15V.
- Connectez l'ICP USB à l'ordinateur à l'aide d'un câble USB de type A.
- Appuyez sur le bouton ON/OFF sur le panneau avant.
C2000 Support Package for MATLAB # (en anglais)
Installez Embedded Coder Support Package for Texas Instruments C2000 Processors for MATLAB. Veillez à vous connecter à l'internet avant de poursuivre.
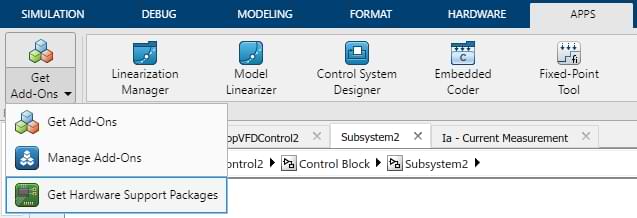
Étape 1 : Cliquez sur Get Hardware Support Package dans l'onglet "Apps" :
Étape 2 : Sélectionnez "Embedded Coder Support Package for Texas Instruments C2000 Processors" et appuyez sur Install :

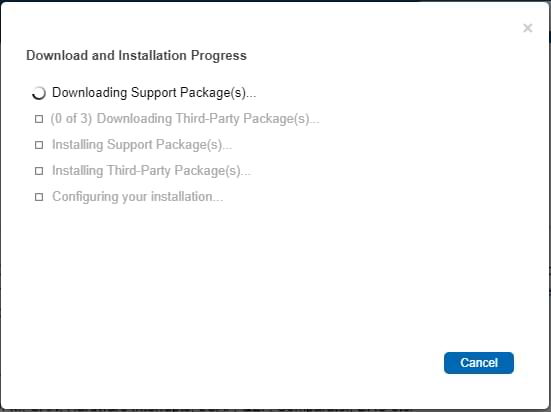
Étape 3 : Une fois l'installation commencée, la fenêtre suivante affiche l'état de l'installation :
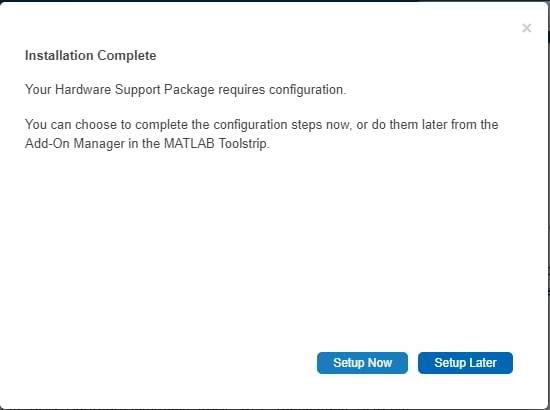
Étape 4 : Une fois l'installation terminée, cliquez sur "Setup Now" :
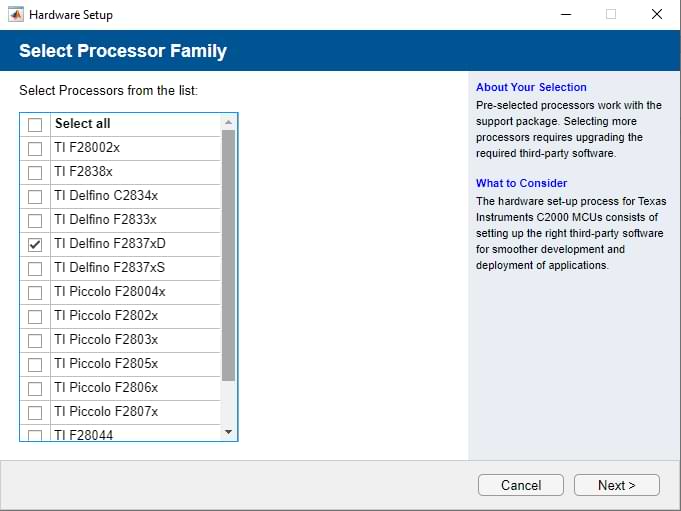
Étape 5 : Sélectionnez TI Delfino F2837xD dans la famille de processeurs et cliquez sur "Suivant" :
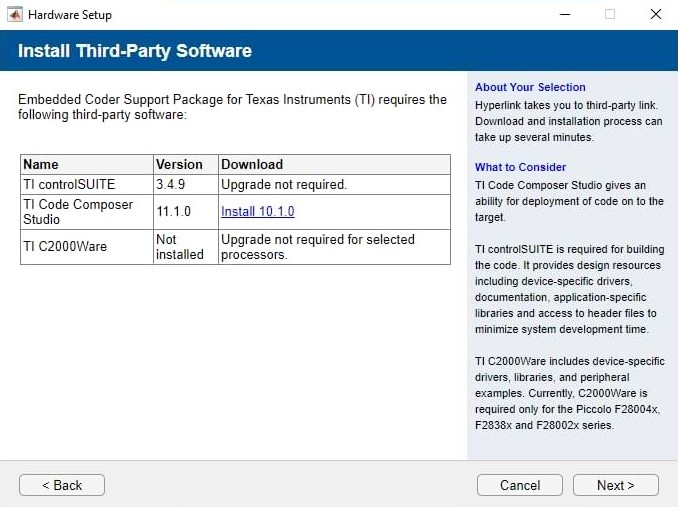
Étape 6 : Installer les logiciels tiers requis et cliquer sur "Suivant" :
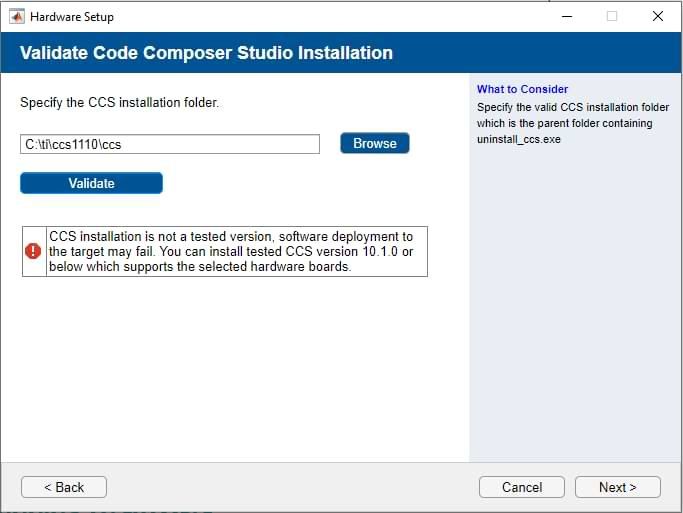
Etape 7 : Pour le dossier d'installation de CCS, cliquez sur "Valider" (Ignorer l'avertissement) et ensuite cliquez sur "Suivant" :
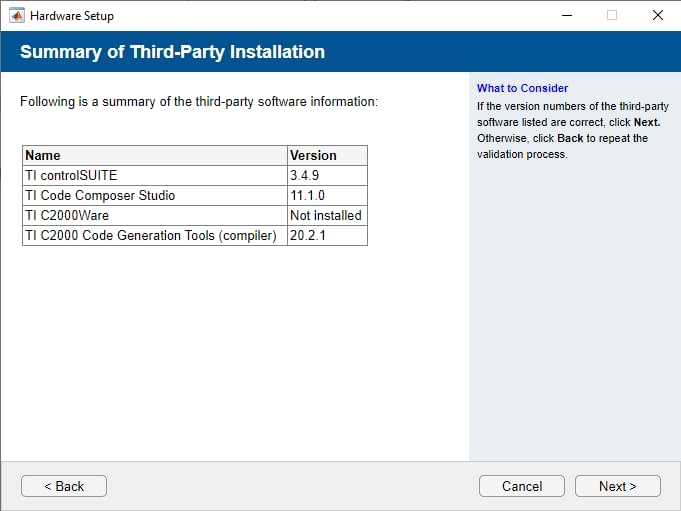
Étape 8 : Lisez le résumé de l'installation et cliquez sur "Suivant" pour terminer l'installation :
Exemple de contrôle V/f en cours d'exécution #
Ce document utilise "PE-RCP V/f Control Example" pour démontrer l'utilisation de la boîte PE-RCP. Veillez à installer tous les outils prérequis avant de poursuivre.
Étape 1 : Téléchargez et ouvrez l'exemple ci-joint.
Étape 2 : Assurez-vous que les paramètres du matériel sont les suivants :

Étape 3 : Cliquez sur Construire, Déployer et Démarrer. L'algorithme commencera à être téléchargé sur la boîte PE-RCP :

Mise en œuvre
Cette section présente la mise en œuvre pratique du contrôle V/f sur un moteur à induction triphasé.
Équipement requis #
Le matériel suivant est nécessaire pour vérifier de manière pratique le fonctionnement du contrôleur V/f.
- PE-Lab (PLB-6PH)
- Charge triphasée (moteur à induction/inducteurs)
- Alimentation en courant continu
Détails de la mise en œuvre
Le boîtier PE-RCP nécessite un étage de puissance externe et une charge triphasée pour la mise en œuvre de cet exemple. Ce guide présente les résultats de la commande VFD sur PE-Lab (PLB-6PH) avec un moteur à induction triphasé comme charge.
Cet exemple illustre les concepts suivants :
- Le contrôle V/f est un algorithme de contrôle de la vitesse pour les moteurs à induction triphasés, ce qui signifie que le rapport V/f reste toujours constant. Si la fréquence diminue, la tension de sortie diminue et vice versa.
- La tension de la liaison CC n'a pas d'effet sur la tension de sortie. En revanche, elle régule l'indice de modulation pour maintenir la tension de sortie constante.
Dans cet exemple, le changement de fréquence est toujours effectué avec un facteur d'accélération déterminé, ce qui permet d'éviter l'utilisation de courants instantanés très élevés.
Cet exemple utilise les blocs TI C2000 suivants pour la mise en œuvre :
Bloc ADC
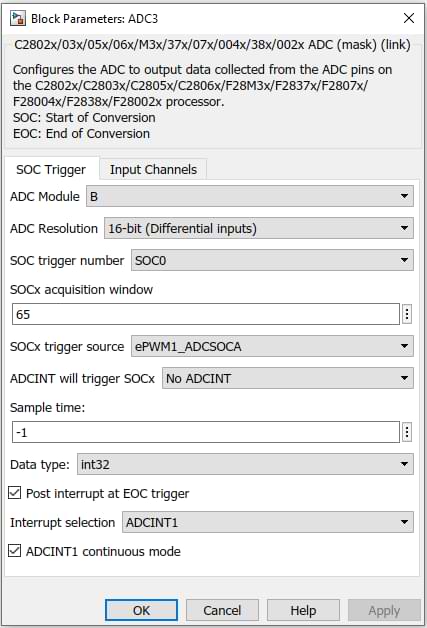
Un bloc ADC individuel contrôle la conversion analogique-numérique d'un seul canal analogique. Ce bloc fournit les paramètres permettant de sélectionner le module, la résolution et le signal de déclenchement appropriés pour le canal analogique requis. L'interruption de l'ADC peut également être activée pour un canal, si nécessaire.
Dans cet exemple, l'ADC 16 bits lit les mesures de la tension de la liaison CC et du courant de phase. Les deux conversions sont déclenchées par le bloc ePWM1 tandis que la fin de la conversion pour la mesure de la tension de la liaison CC génère le signal d'interruption.
Pour plus d'informations, voir le chapitre 11 de ce document : https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf.
Interruption matérielle
Le microcontrôleur F28379D dispose d'une interruption matérielle pour déclencher une action sur différents événements. La sélection de l'interruption est basée sur la table vectorielle PIE. Les détails relatifs à la table vectorielle PIE peuvent être consultés dans le lien ci-dessous :
https://www.mathworks.com/help/supportpkg/texasinstrumentsc2000/ref/c28xhardwareinterrupt.html
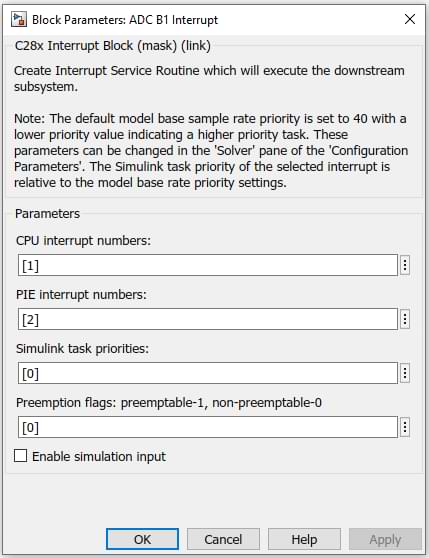
Dans cet exemple, le bloc d'interruption déclenche l'algorithme de contrôle, ce qui permet de calculer les rapports cycliques pour le cycle PWM suivant. Cet exemple utilise l'interruption de fin de conversion sur la mesure de la tension du circuit intermédiaire.
ePWM Bloc #
Le bloc ePWM contrôle le signal PWM. Chaque bloc contient deux signaux PWM : ePWMA et ePWMB. La section Event Trigger peut être utilisée pour l'interruption matérielle de l'ePWM et la synchronisation avec d'autres modules. L'unité Deadband contrôle le temps mort entre la paire PWM.
Dans cet exemple, le bloc ePWM génère les signaux PWM et envoie le signal de début de conversion (SOC) aux modules ADC.

Pour plus d'informations, voir le chapitre 15 de ce document : https://www.ti.com/lit/ug/spruhm8h/spruhm8h.pdf
Spécifications #
Le tableau suivant présente les spécifications de mise en œuvre correspondantes :
| PARAMÈTRE | VALEUR |
| Fréquence PWM | 10 KHz |
| Sortie Fréquence requise | 15 Hz - 25 Hz |
| Tension de liaison DC | 300V - 600V |
| Puissance du moteur triphasé | 380VL-L /50Hz |
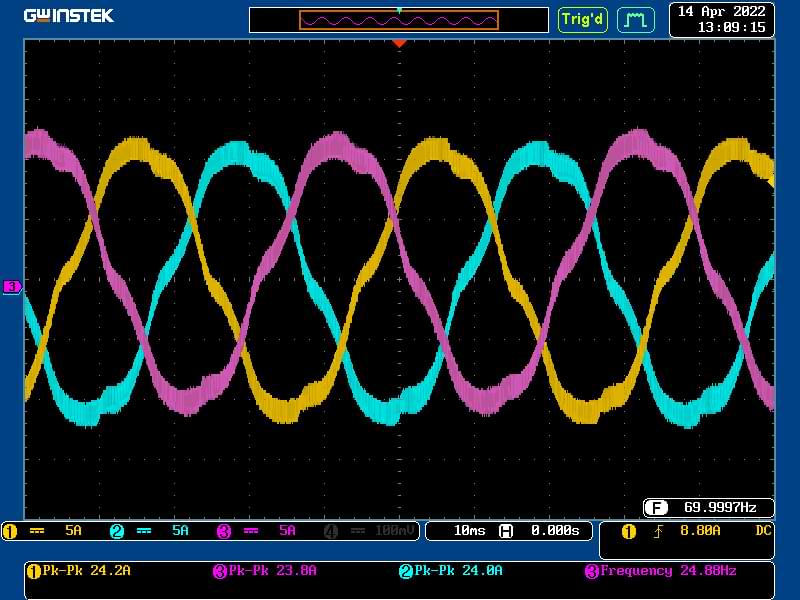
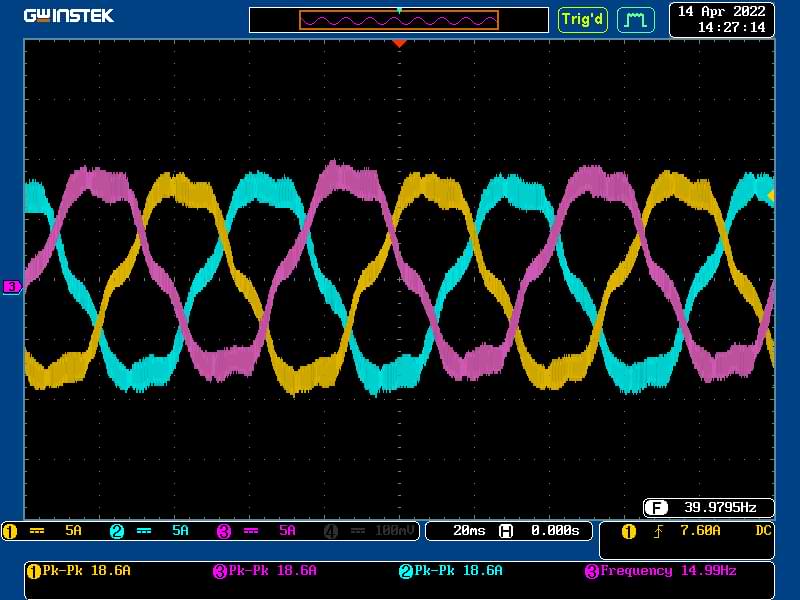
Résultats
Cette section présente les formes d'ondes du courant de sortie pour trois phases à différentes fréquences requises qui peuvent être définies dans le modèle décrit ci-dessus. Les mesures pertinentes sont également disponibles dans les images.
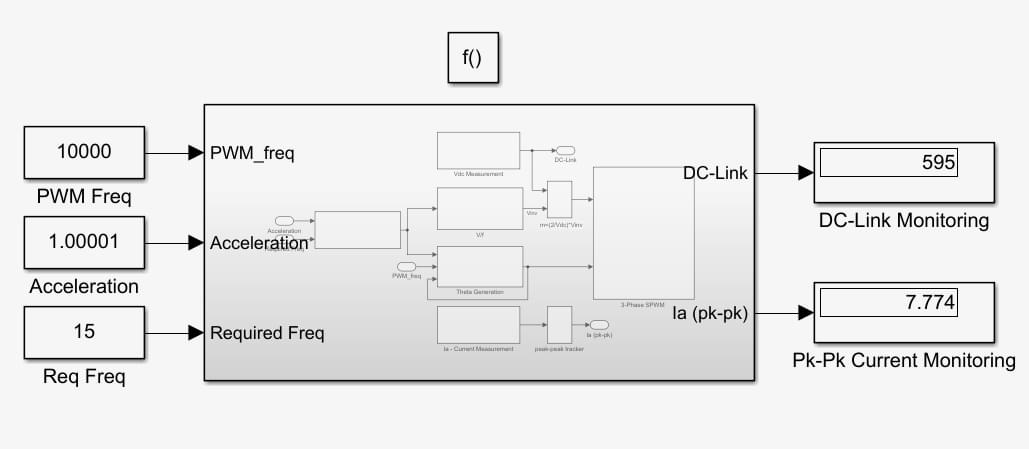
Contrôle et mise au point
Lorsqu'une machine hôte est connectée à la carte cible, les résultats peuvent être contrôlés et débogués en utilisant l'affichage dans MATLAB/Simulink. Pour Tune and Monitor, cliquez sur l'icône verte dans l'onglet hardware.

- La mesure analogique de la tension de la liaison CC et du courant de branche crête à crête (Ia) est surveillée dans Simulink à l'aide du bloc d'affichage.
- La fréquence requise, la fréquence PWM et l'accélération peuvent être modifiées en temps réel à l'aide de blocs constants.