Einleitung #
Dieser Artikel beschreibt, wie man mit der Embedded-Entwicklung auf PEController beginnt.
Vorraussetzungen
Die folgenden Werkzeuge sind Voraussetzung für das Verständnis und die Umsetzung des in diesem Artikel beschriebenen Beispiels:
- STM32CubeIDE 1.9 oder neuere Version
- STM32Cube_FW_H7_V1.7.0 oder neuer
- STM32CubeMX 6.0.0 oder neuere Version
- PEController Board Support Paket
Hardware-Übersicht #
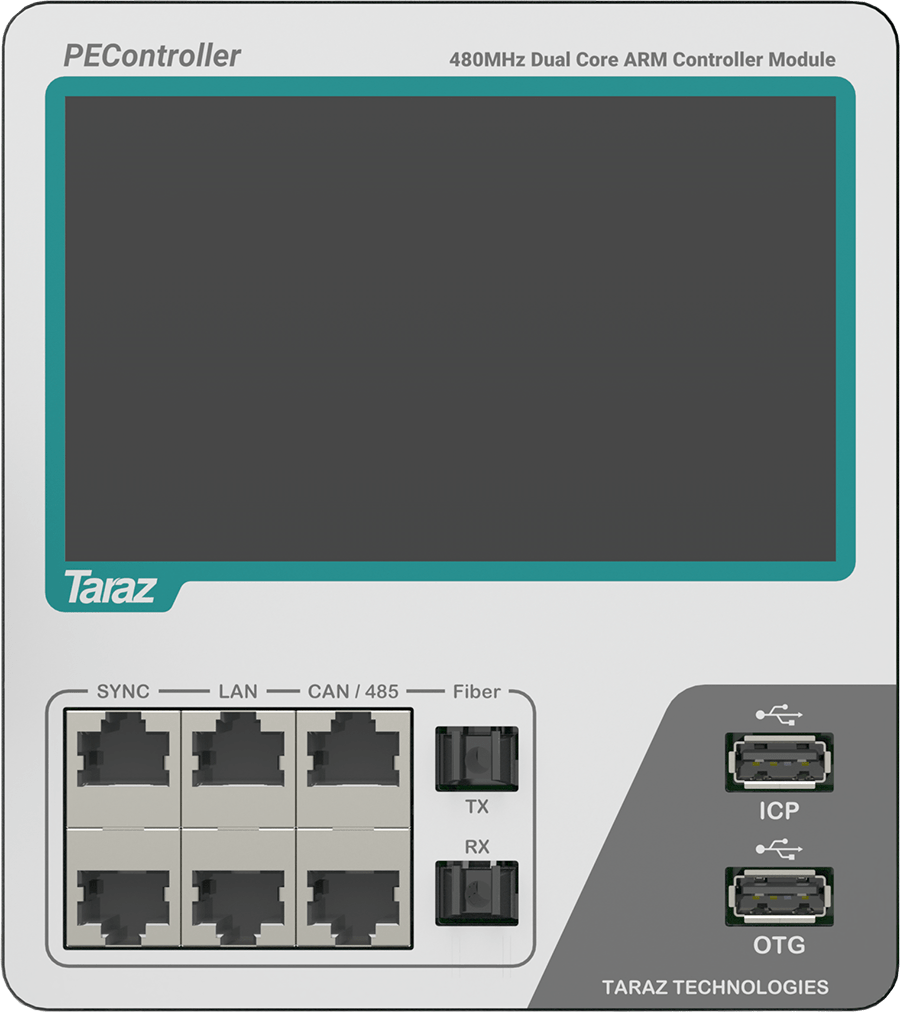
Bereiten Sie den PEController mit den folgenden Schritten für die Ausführung der Demoanwendung vor.
- Schalten Sie den PEController ein. (Im Falle eines eigenständigen PEControllers verwenden Sie den 15-V-Adapter, um den PEController mit Strom zu versorgen).
- Schließen Sie das ICP USB über ein Typ-A-USB-Kabel an den Computer an.
PEController Board Support Paket #
Der PEController wird von Open-Source-Embedded-C-Bibliotheken auf GitHub unterstützt. Das Open-Source-Paket heißt PEController Board Support Package (BSP). Diese Bibliotheken enthalten auch Anwendungsbeispiele, die die Entwicklung beschleunigen können. Diese Bibliotheken sind eine Voraussetzung für diesen Artikel.
Herunterladen des PEController BSP #
Laden Sie die aktuelle Version des PEController BSP mit den folgenden Schritten herunter:
Schritt 1: Rufen Sie den Link https://github.com/Taraz-Technologies/PEControllerBSP auf.
Schritt 2: Drücken Sie den "Code"-Knopf, wie im Bild unten gezeigt, und klicken Sie auf "Download ZIP", um die neueste Version des PEController BSP zu erhalten.

Schritt 3: Entpacken Sie den Ordner aus der heruntergeladenen Zip-Datei.
Schritt 4: Klicken Sie hier, um die Dokumentation für PEControllerBSP aufzurufen
PEController BSP Brief #
Verzeichnisübersicht #
Der folgende Abschnitt beschreibt die aktuelle Verzeichnisstruktur des PEController BSP:

Fahrer #
Dieser Ordner enthält die Gerätetreiber für PEController.
- BSP: Enthält die BSP-Treiber, die von Taraz Technologies bereitgestellt werden.
- PEController
- ADC: Enthält die ADC-bezogenen Gerätetreiber.
- Allgemein: Enthält die allgemeine Freigabe und Definitionen im Zusammenhang mit Gerätetreibern.
- Komponenten: Enthält die verschiedenen Komponententreiber.
- DigitalPins: Enthält die Gerätetreiber für digitale E/A.
- Anzeige: Enthält die displaybezogenen Gerätetreiber.
- intelliSENS: Enthält die Gerätetreiber für die intelliSENS Software-Integration.
- PWM: Enthält die PWM-bezogenen Gerätetreiber.
- PEController
- CMSIS: Enthält die Standardgerätetreiber des Common Microcontroller Software Interface Standard (CMSIS).
- STM32H7xx_HAL_Driver: Dieser enthält das von STMicroelectronics bereitgestellte Gerät.
Middlewares #
Dieser Ordner enthält die Support-Bibliotheken für die Treiber.
- ST: Enthält die von STMicroelectronics bereitgestellten Support-Bibliotheken für USB und Networking usw.
- Taraz: Enthält die von Taraz Technologies bereitgestellten Bibliotheken zur Unterstützung des Entwurfs von Steuerungssystemen (z. B. Clarke/Park-Wandlungen, digitale Filterung, PLL-Generierung usw.).
- Dritte_party: Enthält Unterstützungsbibliotheken von Drittanbietern wie LWIP, FreeRTOS und FatFS.
Projekte #
Dieser Ordner enthält die im BSP enthaltenen Anwendungsbeispiele.
- PEController
- Anwendungen.
- PEController_Vorlage: Vorlagenprojekt für die Erstellung neuer schneller Projekte.
- PELab_OpenLoopVFD: Grundlegende Implementierung der Open-Loop-V/f-Steuerung, die für verschiedene Varianten von PELab sowie für unabhängige PEController-Karten implementiert wurde.
- Anwendungen.
Ausführen des Open Loop V/f-Beispiels #
Dieser Artikel verwendet das Beispielprojekt PELab_OpenLoopVFD, um die Verwendung mit PEController zu demonstrieren. Stellen Sie sicher, dass Sie alle erforderlichen Tools installiert haben, bevor Sie fortfahren.
Schritt 1: Öffnen Sie das Verzeichnis, das das von GitHub heruntergeladene PEController BSP enthält.
Step 2: Open the “.project” file in {Project_path}/ Projects/PEController/Applications/PELab_OpenLoopVFD. This will add the project with its two nested projects in the STM32CubeIDE workspace.

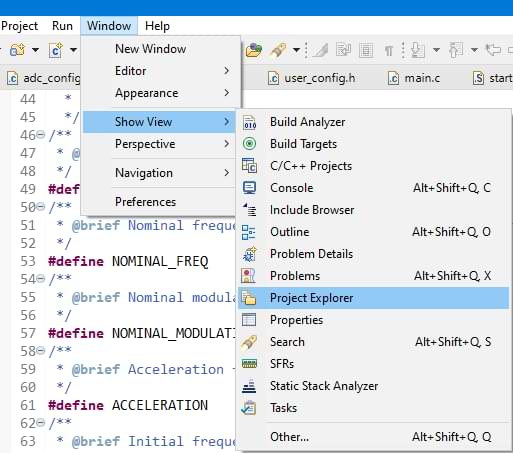
Schritt 3: Öffnen Sie den Projekt-Explorer über den Menüpunkt "Fenster", wie in der folgenden Abbildung gezeigt:
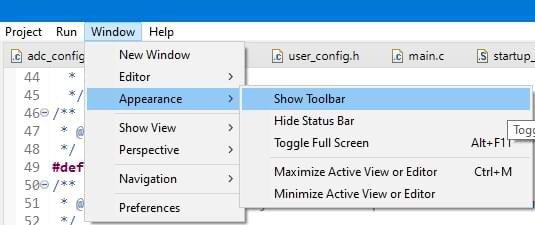
Schritt 4: Vergewissern Sie sich, dass Sie die Symbolleiste unter dem Menüpunkt "Fenster" aktivieren, wie unten gezeigt:
Schritt 5: Erweitern Sie das Projekt PELab_OpenLoopVFD. Im Projekt ist zu erkennen, dass es zwei verschachtelte Projekte hat, eines für den CM4-Kern und eines für den CM7-Kern, wie in der folgenden Abbildung zu sehen ist:

Schritt 6: Die Logik im BSP ist so aufgeteilt, dass die Messwerterfassung, die LCD-Anzeige und andere Hilfsfunktionen vom CM4-Kern gesteuert werden, während der CM7-Kern für die Implementierung des Regelalgorithmus verwendet wird, um eine bessere Regelleistung zu erzielen.
Schritt 7: Beide Projekte enthalten die folgende Struktur:
- BSP: Enthält die BSP-Treiber.
- Common: Enthält die gemeinsamen Dateien wie z. B. Konfigurationen, die sowohl von CM4- als auch von CM7-Kernen genutzt werden.
- Kern: Enthält die Haupt- und andere Dateien, die von der STM32CubeMX-Software erzeugt werden.
- Treiber: Enthält die STMicroelectronics-Treiber.
- UserFiles: Enthält die projektbezogenen Dateien.
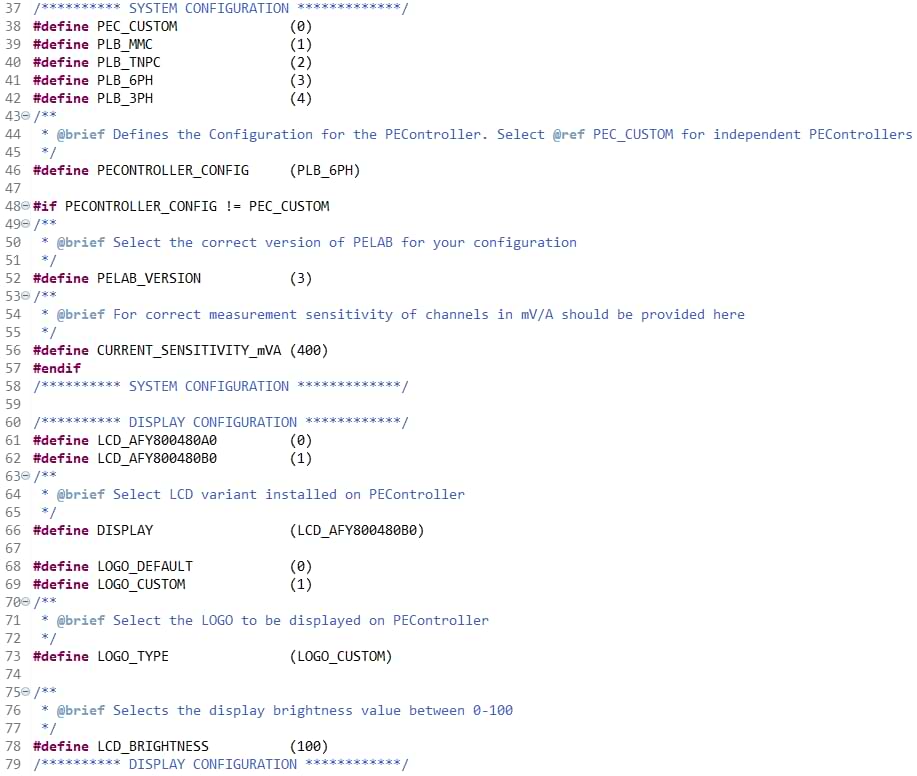
Schritt 8: Bearbeiten Sie die folgenden Informationen in der Datei "user_config.h" in Common/Inc:
- Wählen Sie den Hardwaretyp über den Parameter PECONTROLLER_CONFIG aus. Wählen Sie PEC_CUSTOM für unabhängige PEController, während Sie für PELab die entsprechende PELab-Konfiguration auswählen.
- Falls der PEController im PELab montiert ist, wählen Sie den entsprechenden Wert von PELAB_VERSION und CURRENT_SENSITIVITY_mVA. Die entsprechenden Informationen finden Sie im PELab-Datenblatt.
- Wählen Sie das passende Anzeigemodul für Ihren PEController.
Schritt 9: Klicken Sie mit der rechten Maustaste auf PELab_OpenLoopVFD_CM4 und klicken Sie auf Projekt erstellen:
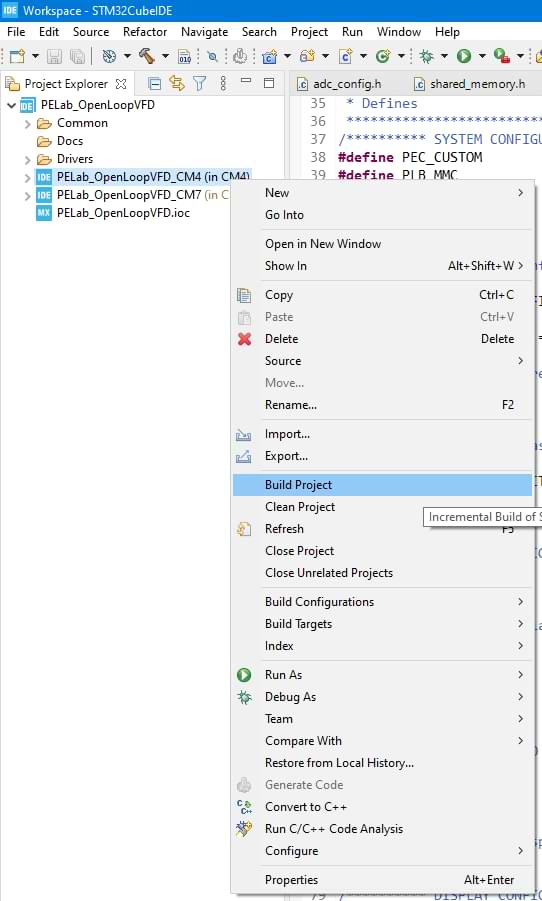
Schritt 10: Klicken Sie mit der rechten Maustaste auf PELab_OpenLoopVFD_CM7 und klicken Sie auf Projekt erstellen.
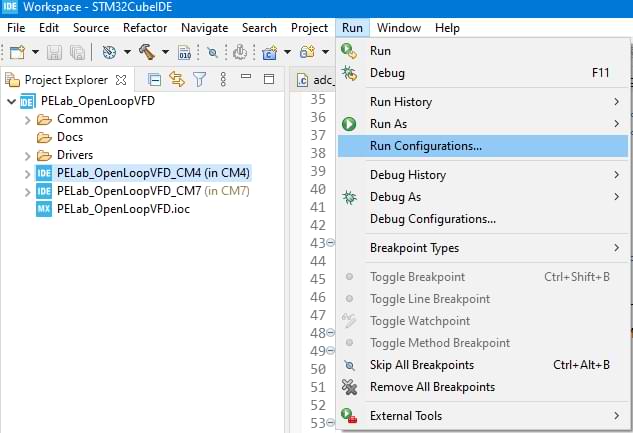
Schritt 11: Klicken Sie auf Ausführen und dann auf Konfigurationen ausführen... in den Menüpunkten:
Schritt 12: Gehen Sie in PELab_OpenLoopVFD_CM4 auf die Registerkarte Startup:

Schritt 13: Die obige Abbildung zeigt, dass das Projekt PELab_OpenLoopVFD_CM4 so konfiguriert ist, dass der Code für den CM4-Kern nicht erstellt oder heruntergeladen wird. Diese Option ermöglicht das gleichzeitige Debuggen von CM4- und CM7-Kern. Das CM7-Projekt (siehe Abbildung unten) ist für die Programmierung des CM7- und CM4-Kerns zuständig:
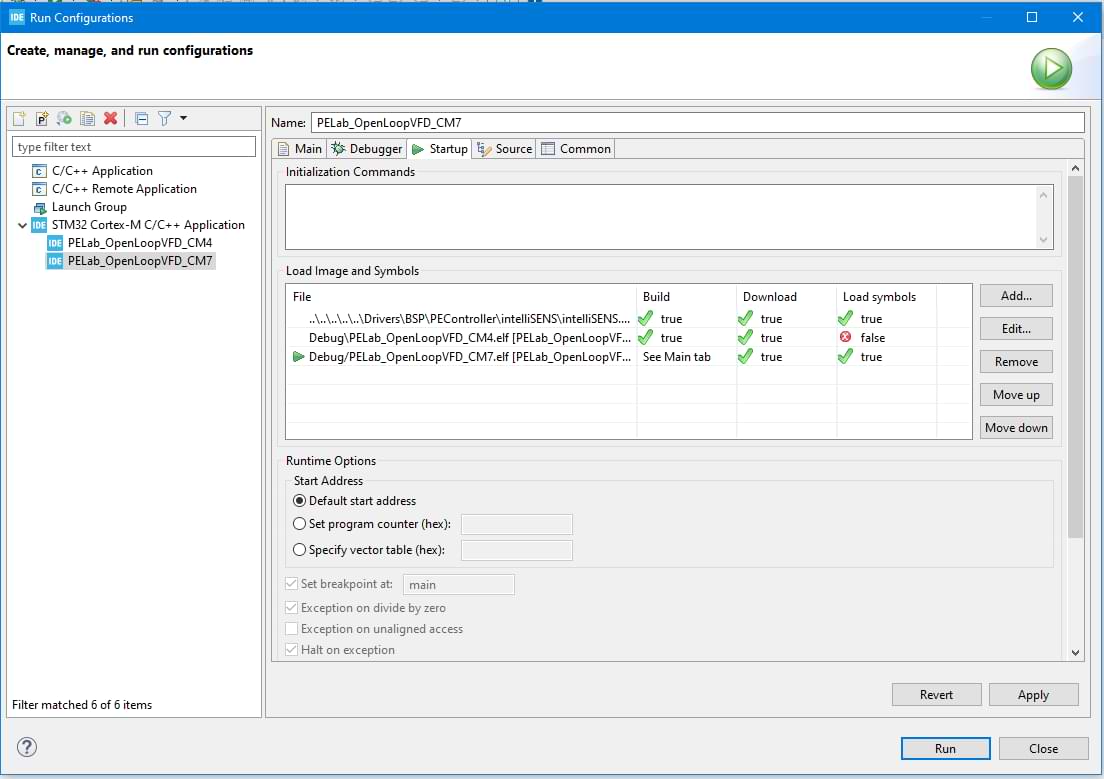
Schritt 14: Vergewissern Sie sich, dass das CM7-Projekt im obigen Fenster ausgewählt ist, und drücken Sie Ausführen, um den Code auf beide Kerne hochzuladen.
Umsetzung und Ergebnisse #
In diesem Abschnitt wird die praktische Umsetzung der U/f-Steuerung mit offenem Regelkreis an einer induktiven Last beschrieben.
Erforderliche Ausrüstung #
Für die praktische Überprüfung der Funktionsfähigkeit der U/f-Steuerung sind die folgenden Geräte erforderlich.
- PELab mit integriertem PEController
- Dreiphasige Last (Induktionsmotor oder Induktoren)
- DC-Stromversorgung
Details zur Umsetzung #
Die Umsetzung ist für eine Vielzahl von Konfigurationen von PELab möglich. Der eigenständige PEController benötigt für die Umsetzung dieses Beispiels eine externe Leistungsstufe und die dreiphasige Last. In diesem Leitfaden werden die Ergebnisse des Open-Loop-V/f-Beispiels auf PELab (PLB-6PH) mit internen Induktoren als dreiphasige Last besprochen.
Das Beispiel demonstriert die Steuerung des Modulationsindexes auf der Grundlage der Stromfrequenz, da die Zwischenkreisspannung konstant ist. Zu Beginn der Demonstration beträgt die Ausgangsfrequenz 1 Hz. Die Frequenz steigt mit einem bestimmten Beschleunigungsfaktor an, bis sie den gewünschten Frequenzwert erreicht. Damit wird die Sanftanlauffähigkeit für Drehstrommotoren demonstriert, so dass hohe Stromanforderungen beim Anfahren vermieden werden können.
Die folgende Tabelle enthält relevante Implementierungsspezifikationen:
| PARAMETER | WERT |
| PWM-Frequenz | 40 KHz |
| Ausgang Erforderliche Frequenz | 25 Hz |
| Ausgang Anfangsfrequenz | 1 Hz |
| Zwischenkreisspannung | 50 V |
| Induktivität | 2,5 mH |
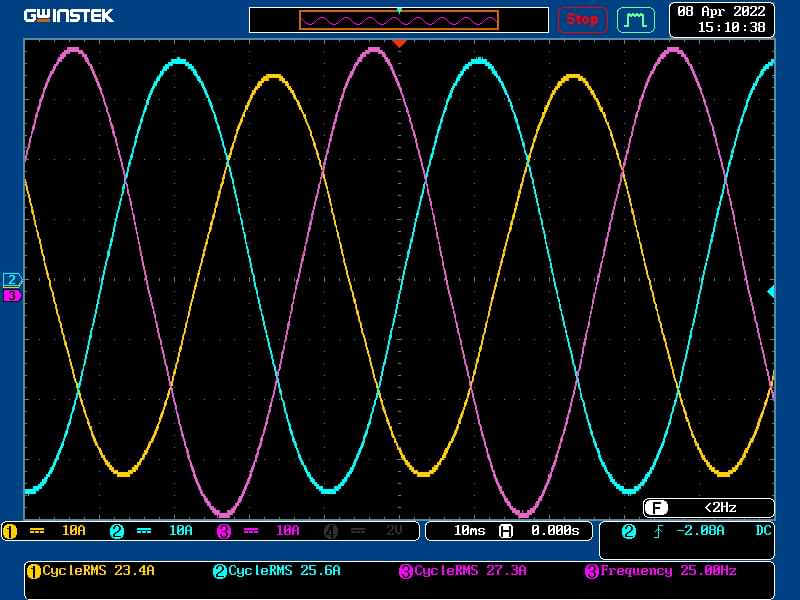
Ergebnisse #
Dieser Abschnitt enthält die Ausgangsstromwellenformen für die drei Phasen bei der gewünschten Frequenz. Jede Stromwellenform wird in einer anderen Farbe dargestellt. Entsprechende Messwerte sind auch im Bild verfügbar.
Fehlersuche im Beispiel #
In diesem Abschnitt wird das Verfahren zum gleichzeitigen Debuggen des CM7- und CM4-Kerns für das Projekt beschrieben. Führen Sie die folgenden Schritte aus, um das Open-Loop-U/f-Projekt zu debuggen.
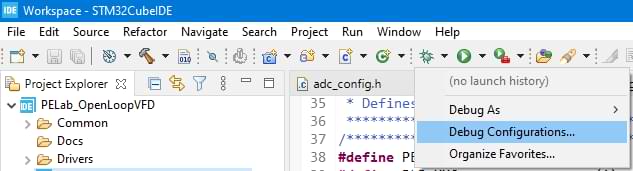
Schritt 1: Klicken Sie auf den Pfeil neben dem Debug-Symbol in der Symbolleiste und klicken Sie auf den Menüpunkt Debug-Konfigurationen, wie in der Abbildung unten gezeigt:
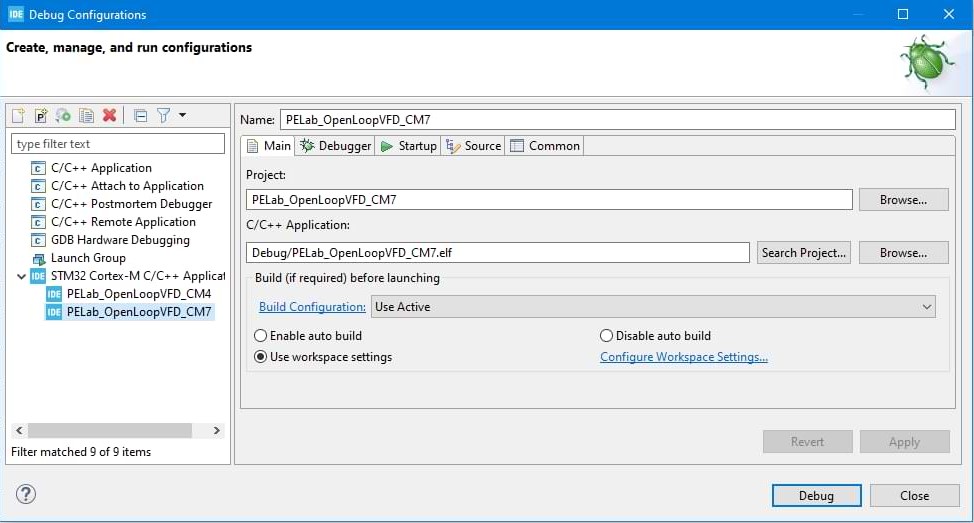
Schritt 2: Wählen Sie die Startkonfiguration PELab_OpenLoopVFD_CM7 und drücken Sie die Taste Debug:
Schritt 3: Drücken Sie die Schaltfläche "Fortsetzen" in der Symbolleiste, sobald die Anwendung geladen ist. Vergewissern Sie sich, dass die Anwendung vollständig geladen ist, bevor Sie die Schaltfläche "Fortsetzen" drücken, um Fehler zu vermeiden.
Schritt 4: Klicken Sie in der Symbolleiste auf den Pfeil neben dem Symbol Debug und dann auf den Menüpunkt Debug-Konfigurationen:
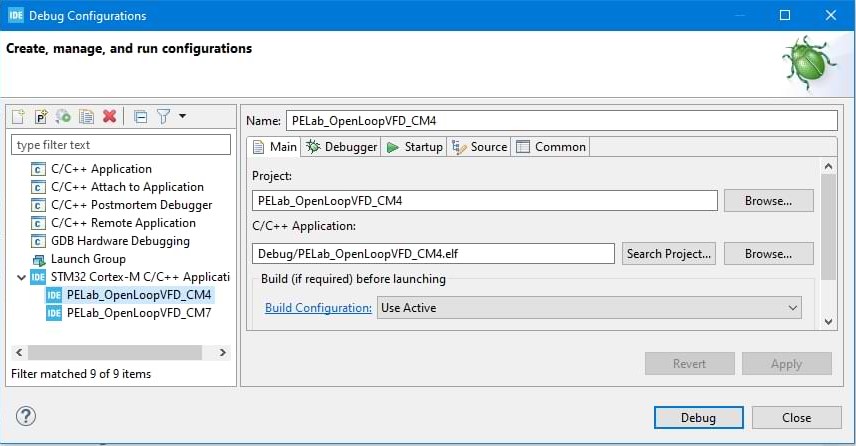
Schritt 5: Wählen Sie die Startkonfiguration PELab_OpenLoopVFD_CM4 und drücken Sie die Taste Debug.
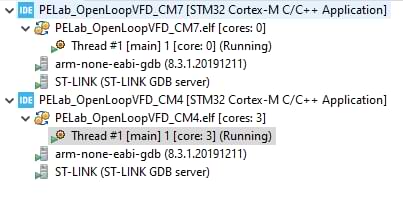
Schritt 6: Das Debug-Fenster sollte wie das folgende Bild aussehen, in dem beide Projekte ausgeführt werden:
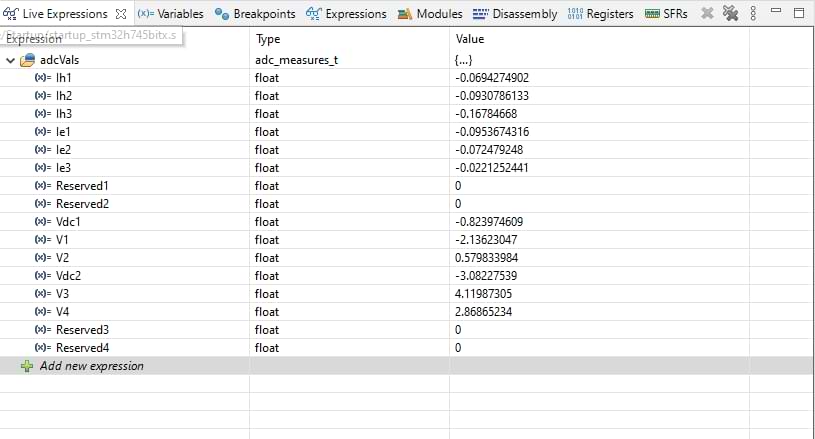
Schritt 7: Öffnen Sie die Registerkarte Live-Ausdrücke, schreiben Sie adcVals in die Spalte Ausdruck und drücken Sie die Eingabetaste. Drücken Sie auf den Pfeil neben adcVals, um die Live-Wert-Rückmeldung von den analogen Kanälen zu sehen. Die Struktur für adcVals ist in adc_config.h definiert, und ihre Mitglieder können je nach Ihrer Konfiguration variieren. Die Live-Feedback-Ansicht sieht ähnlich aus wie in der Abbildung unten, und die Werte ändern sich ständig:
Schritt 8: Drücken Sie die Schaltfläche Beenden in der Symbolleiste für beide Projekte, um die Debugging-Sitzung zu beenden.





